

 English
EnglishUsage
Introduction openwrt
Allwinnner V831 use Tina Linux, which is created from OpenWrt.
The OpenWrt is a Linux operating system targeting embedded devices. Visit official-website and official open repository for more details.
For V831 we use adb shell to control it. Connect otg interface marked on board with computer.
- Fow Windows users, download the latest adb, add its path into system path and save it then use command
adb shellto connect V831. - For linux we need to install adb first, then run command
adb shellto connect V831.
Wireless connection
There is a 2.4G wireless module on M2Dock, with which we can connect to wireless network.
Because of the change of different system image, the ways to connect to wireless network on V0.5.4 system version and system version before V0.5.4 are different.
V0.5.4
In this system version, we remove the way to connect wireless network by editing wpa_supplicant.conf file of the u-disk, and we use commands to connect wireless network.
We can see there are many linux commands about wifi in this system.
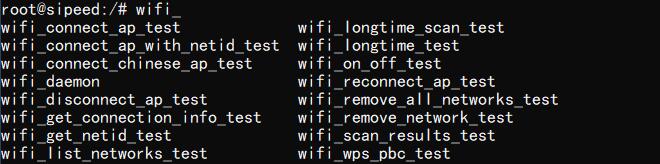
Here we use wifi_connect_ap_test to connect wireless network, and we can use wifi_scan_results_test to scan the wireless network to see whether M2Dock detects your target network.
We use following command connect wireless network named Sipeed_Guest and its password is qwert123.
wifi_connect_ap_test Sipeed_Guest qwert123
Change Sipeed_Guest into your target wireless network name and change qwert123 into your target wireless network password.
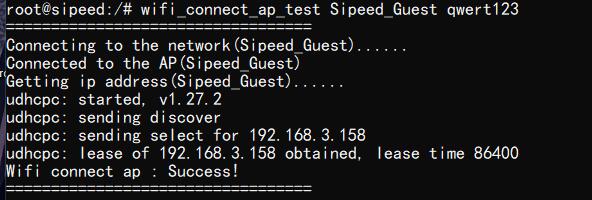
From the connection message, we can see 192.168.3.158, this is the IP address of M2Dock in this network environment.
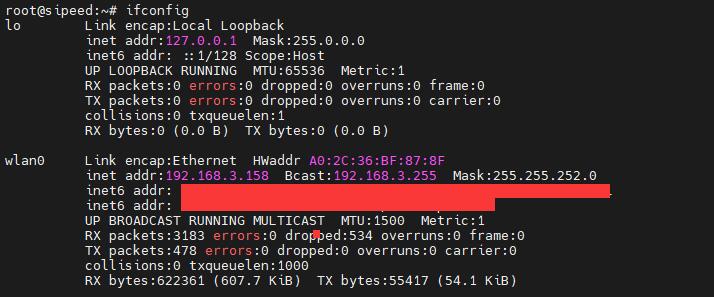
We can run ifconfig on M2Dock to see the ip address, from which we see that the ip address is the same as the wireless network connection message.
V0.5.4 and previous image
Connect M2Dock USB-OTG port to computer, there is a u-disk in your computer.
Edit the wpa_supplicant.conf file which is in the u-disk,
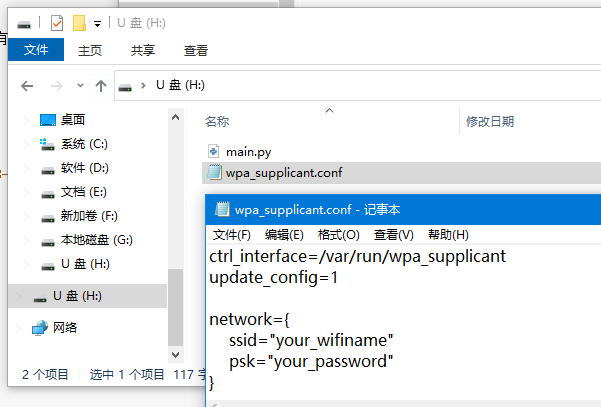
Change yourWIFIname and yourWIFIpassword into your target wireless network name and password. Then remove the u-disk from your system, use your operating system command to remove the u-disk, otherwise this file will be damaged. After removing the u-disk, reboot M2Dock by press RST KEY.
Update MaixPy3
Download MaixPy3 manually: https://pypi.org/project/maixpy3/#history
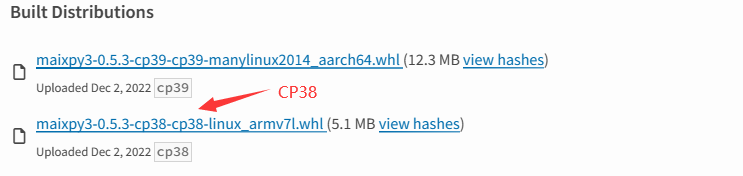
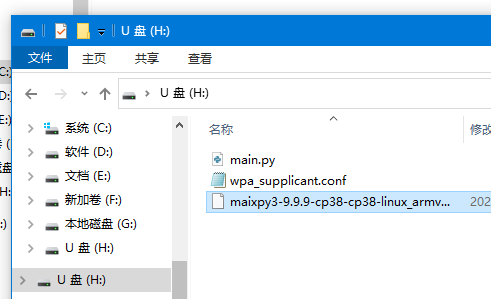
Download the file whose name incorporates cp38, then rename it into maixpy3-9.9.9-cp38-cp38-linux_armv7l.whl, save it into the u-disk of M2Dock, reboot your board and maixpy3 will update automatically at boot up.
Do Not Do Any Operation When Updating.
Okpg package management
The opkg utility is the lightweight package manager used for upgrading the functionality of the system rather significantly by downloading and installing pre-made packages from package repositories.
Related common commands
- opkg update # Update the updatable utility
- opkg upgrade # Upgrade the upgradable utility
- opkg list # list all utility
- opkg install # install target utility
- opkg remove # remove target utility
For example:
root@sipeed:/# opkg list
MaixPy3 - 0.2.5-1
alsa-lib - 1.1.4.1-1
busybox - 1.27.2-3
busybox-init-base-files - 167-1612350358
ca-certificates - 20160104
curl - 7.54.1-1
dropbear - 2015.71-2
e2fsprogs - 1.42.12-1
eyesee-mpp-external - 1.0-1
eyesee-mpp-middleware - 1.0-1
eyesee-mpp-system - 1.0-1
Test screen
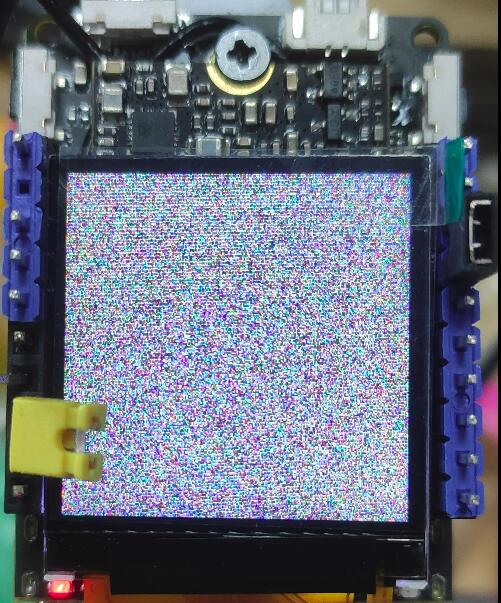
- There is a flushing on screen after power on. this means the board is well working, and the flushing is caused by the system reset.
We can use command cat /dev/urandom > /dev/fb0 to test the screen.
Run python3
We can type python3 in adb shell to run python3 in interative mode on V831.
import platform
print(platform.uname())
Actual operation on 2022.07.06
__ _
/ / (_)__ __ ____ __ ------------------------
/ /__/ / _ \/ // /\ \ / sipeed.com (Neptune)
/____/_/_//_/\_,_//_\_\ ------------------------
root@sipeed:/# python3
Python 3.8.5 (default, Jun 14 2022, 09:51:56)
[GCC 6.4.1] on linux
Type "help", "copyright", "credits" or "license" for more information.
>>> import platform
>>> print(platform.uname())
uname_result(system='Linux', node='sipeed', release='4.9.118', version='#3242 PREEMPT Tue Jun 28 04:03:38 UTC 2022',
machine='armv7l', processor='')
Test camera
We use MaixPy3 to test camera, let's run python3 first.
from maix import camera, display, image
display.show(camera.capture())

If your screen doesn't display anything, make sure your mirror is the latest one and your drivers are correct.
How to use USB camera
There are 2 USB Type-C ports on M2Dock. One masked UART is for the serial communication between this board and computer, another port masked with OTG is used for user-defined functions. We set it usb_device default, so we can use adb to control this board by default. And by adb forware, we can run jupyter code on M2Dock without network but only one usb cable.
To connect USB camera, we need to set the OTG port to be the usb_host.
Run the following command on M2Dock to change its function, but remember this command will stop the communication between computer and M2Dock via ADB USB OTG port.
echo "usb_host" > /sys/devices/platform/soc/usbc0/otg_role
Then we can control the USB camera device which is in the /dev directory.
How to set USB OTG port usb_device mode
The OTG port is usb device mode by default, by which we can control this board via adb. And maybe we changed its function to be a USB host for some reason and now we want to change it back to being a USB device. Just run the following command on M2Dock(You can run the following command on M2Dock via UART with 115200 baudrate).
echo "usb_device" > /sys/devices/platform/soc/usbc0/otg_role
ToolChain
Here is a toolchain for V831, it can be run in linux system.
MaixPy3
We suggest you use Maixpy3 to develop , and its English documents will come out soon.
SDK development
Now we have open V831 source code here, use this https://github.com/Tina-Linux/tina-V83x if you need.
