中文
中文MaixSense-A075V
| 时间 | 负责人 | 更新内容 |
|---|---|---|
| 2022.08.10 | lyx | 初次编写文档 |
| 2022.11.15 | lyx | 补充细节 |
产品概述

MaixSense-A075V 是一款具有 320x240 分辨率及 RGB 功能的 3D TOF 摄像机模组,
支持 Linux 下免驱的即插即用,可通过上位机显示彩色 3D 画面并记录点云
产品开箱指南
准备工作
在 Windows 系统上运行预览 MaixSense-A075V 的话需要安装驱动。
Windows 安装驱动教程:点击查看
网页上位机预览
注意:模组上电前一定要确保网络环境中没有使用
192.168.233.0/24的地址段,
MaixSense-A075V 会使用 RNDIS 并设置自己的iP地址为http://192.168.233.1.

根据上图将模组通电接入 PC 端,这时自带的风扇会开始工作以及镜头处会显示有蓝灯在闪烁,选择浏览器输入 http://192.168.233.1 预览 3D 点云图,上电后有延迟等待 10s-15s 系统和程序才会启动完成。
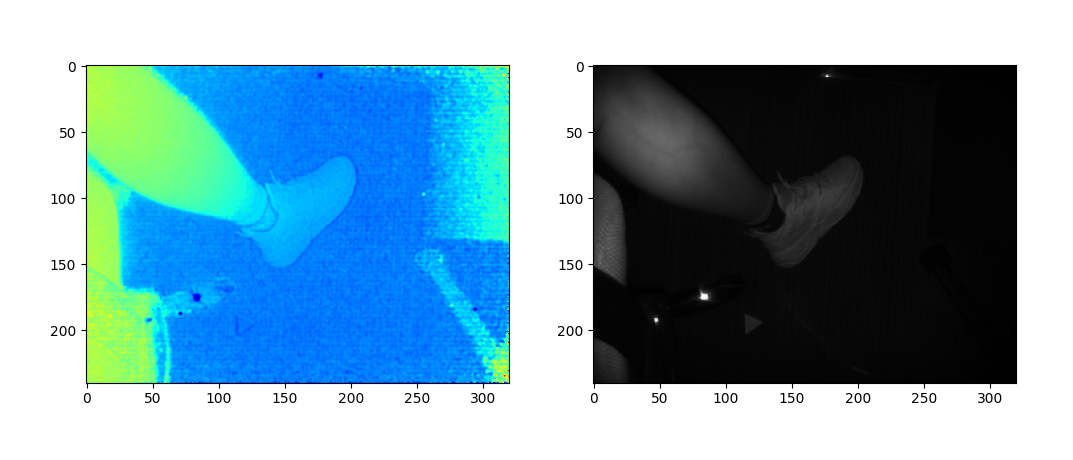
使用网页上位机快速预览(正面和侧面):
可选预览深度伪彩点云,取消勾选页面右侧的交互面板上的第一行 RGB_Map 即可。

互动配置
网页上位机交互面板提供了一系列配置和功能,可以实时预览变动的效果。
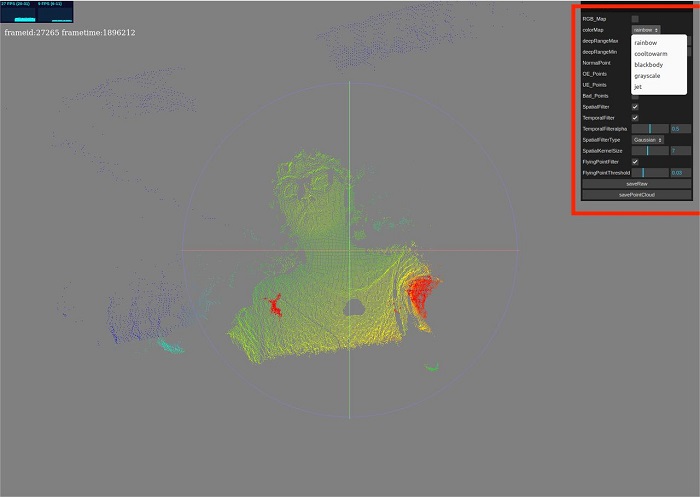
交互面板控件说明
- RGB_Map:多选框 开关 RGB 映射,即关闭时只显示深度伪彩点云,打开时显示 RGB 映射点云。
- colorMap:下拉栏 提供了几个伪彩映射选项(即 cmap ),推荐使用 jet,RGB_Map 关闭时有效。
- deepRangeMax 和 deepRangeMin 滑动条是设定 cmap 的映射范围的,即只有位于 deepRangeMin 和 deepRangeMax 之间的数值(深度值)会通过 cmap,RGB_Map 关闭时有效。
- NormalPoint:多选框 开关显示正常点(TOF 成像会有无效点,对应的相反描述),需要打开。
- OE_Points:多选框 开关显示 OE 点,建议关闭。
- UE_Points:多选框 开关显示 UE 点,建议关闭。
- Bad_Points:多选框 开关显示无效点,建议关闭。
- SpatialFilter:多选框 开关空间滤波,基于下面的 SpatialFilterSize 值和 SpatialFilterType 指定的算法进行处理。
- TemporalFilter:多选框 开关时间滤波,基于下面的 TemporalFilteralpha 值做了一个时间上的平均。
- TemporalFilteralpha:滑动条 设定时间滤波所需时长,适中即可,可自行尝试体验其它效果。
- SpatialFilterType:下拉栏 设定空间滤波算法,提供高斯滤波(Gaussian)和双边滤波(Bilateral),双边滤波性能要求较高,不建议使用。
- SpatialFilterSize:滑动条 设定空间滤波所需范围,适中即可,可自行尝试体验其它效果。
- FlyingPointFilter:多选框 开关飞点过滤,基于下面的 FlyingPointThreshold 值作为过滤阈值,超过阈值的将被过滤掉,建议适中配置,否则有效点也会被剔除。
保存数据
网页版上位机控件栏最下方提供两个按钮,用户可根据以下的说明去使用。
SaveRaw:可保存一帧 raw 数据,如果需要使用深度或 IR 或 RGB 数据进行二次开发的话,则需要了解 raw 的数据结构。不过我们也提供详细的 jupyter notebook 供用户和开发者使用和了解 raw 数据的处理过程。
SavePointCloud:可保存一帧 3D 点云图,保存格式为 pcd ,同样可以通过上述提供的脚本预览。
注意:raw 数据可通过开放的接口获取,开发者进行解析即可基于此二次开发,但点云 pointcloud 是基于 raw 数据和相机内参进行计算得到的,无相应接口提供。
SSH 登录
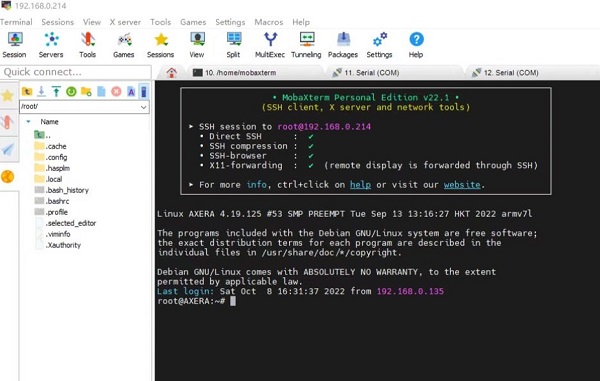
除了直接使用网页上位机进行预览,我们还可以使用 SSH 进行登录操作。
点此展开查看 MobaXterm 介绍
MobaXterm 是在 Windows 下使用的全能终端管理软件,而 Linux 系统可以使用 ssh 远程被操作,使用 MobaXterm 进行 ssh 登陆板子直接编辑板内的代码或执行命令,也能方便的拖拽文件上传或下载到电脑里,类似的工具还有 vscode remote 远程登录 linux 服务器。
MobaXterm:点击前往下载 分别有付费与免费双版本,下载免费版本即可。
MobaXterm 使用例程:点击查看
根据上面网页预览的画面可以知道所使用的 ip 为 192.168.233.1, 所以我们可以使用这个 ip 和登录密码 root 来登录到 TOF 模组的终端系统中。
Windows:参照上文例程使用模组自带的 ip 地址 192.168.233.1 进行登录。
Linux:使用登录密码 root 直接使用以下的命令行登录终端进行操作。
ssh root@192.168.233.1
固件更新
替换 /root/maix_dist 下对应的文件即可。
案例:远中近点云实拍
高精度的映射物品摆放距离的差异,点云图可直观清楚感受到更真实的可视化。

案例:避障小车
模组可搭载小车或无人机来回移动获取障碍物的远近深度值,并通过差异判断画面中是否有障碍物,做出快速反应并精准规避障碍物。
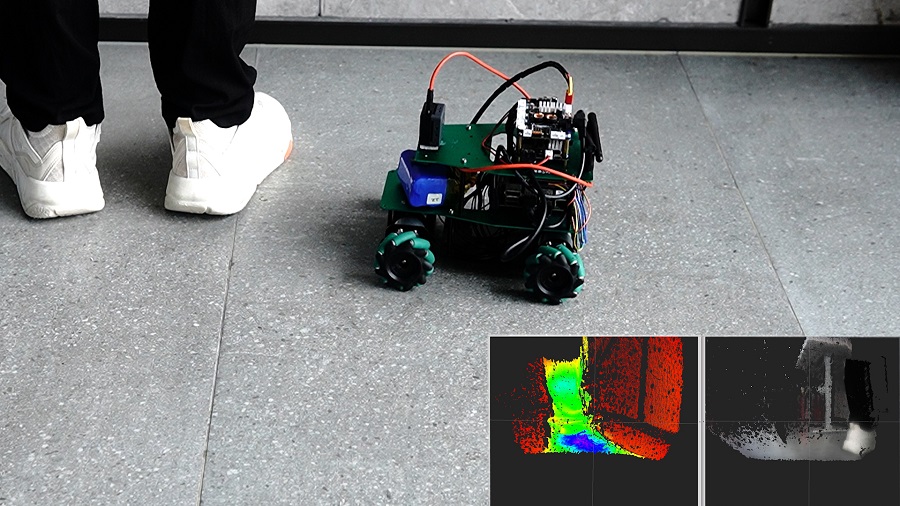
例程暂未开源,待整理公开
案例:检测人流
可实时监控人流,进行更高精度以及大分辨率的统计。
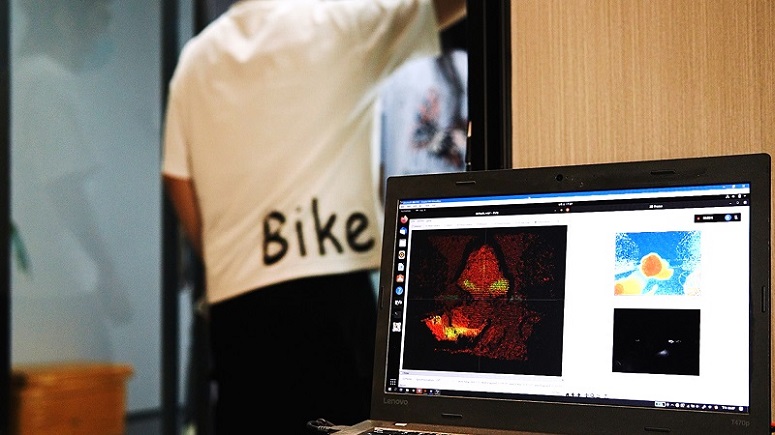
例程暂未开源,待整理公开。
二次开发:SDK 支持
python SDK
这是基于 python 3 软件开发工具包,MaixSense-A075V 对外开发了 http 接口,我们可通过 http 请求获取到原生数据(包括深度图,ir 图,rgb 图),为了方便用户理解数据包的结构及获取还有解码的相关逻辑,因此我们提供封装了 http 请求和原生数据的解码相关函数,用户基于此可进行二次开发。
SDK 获取方式:点击下载
使用方式:安装 jupyter 后连接模组打开我们提供的 toturial.py 即可。
解包推流
理解了上述 python SDK 数据获取和解码的逻辑后,我们可以尝试进阶版,连续获取解码并调用第三方 python 图像库。例如:matplotlib 进行实时显示,而 toturial.py 给出了获取一帧数据的逻辑实现,通过 plt 显示并外套循环即可做到实时显示。
解包推流:点此展开查看 stream.py 内容
使用方式:装好所有的依赖包后即可 python stream.py 运行。
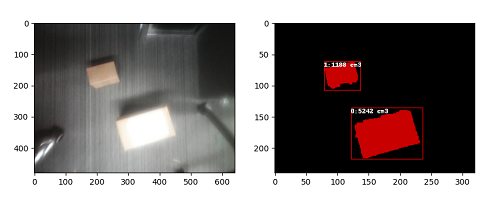
检测体积
基于第三方 python 包,理解了上述数据获取和解码的逻辑后再次进阶,
持续显示多帧并且再通过 SDK 获取模组内参数计算出粗略的点云,并进行累加得到物品的总体积。
限制:要求俯视图可以看到除底面外的所有细节
检测体积:点此展开查看 calVolumes.py 内容
使用方式:装好所有的依赖包后即可 python calVolumes.py 运行,命令行有后续操作提示。
二次开发:接入 ROS
首先需要根据自己电脑安装对应版本的 ROS
接入 ROS1
1. 准备工作
运行 ROS 前我们要准备适用的环境:Linux 系统。
可使用虚拟机 virtual box 或者 vmware:点击前往下载
也可以自行安装双系统,安装方法请自行搜索或参考右侧:双系统安装教程
2. 安装运行
ROS1 接入包:点击前往下载
#解压缩sipeed-tofv075-ros.zip,并进入目录
source /opt/ros/*/setup.sh
catkin_make
source devel/setup.sh
rosrun sipeed_tof_cpp publisher
#之后终端会持续刷新命令行
3. 可自行在 RQT 查看帧率
4. RVIZ 预览
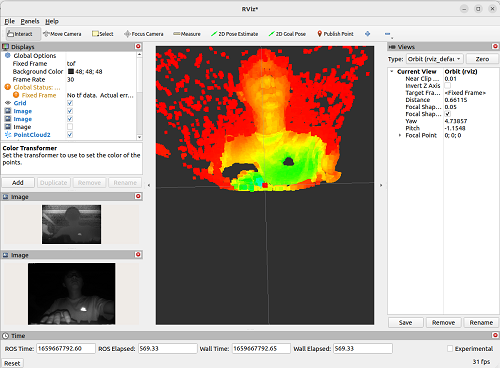
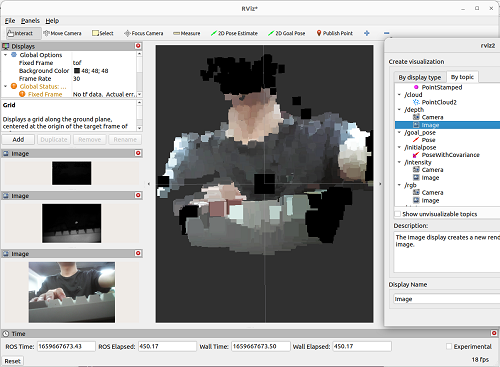
打开 rviz2 后,在界面左下角的 Add->By topic->PointCloud2或/depth ->Image 添加 ->Display/Global Options/Fixed Frame 需要修改成 tof 才能正常显示点云,根据添加的内容左侧会显示 Image 而中间则显示点云。
接入 ROS2
1. 准备工作
运行 ROS 前我们要准备适用的环境:Linux 系统。
可使用虚拟机 virtual box 或者 vmware:点击获取
也可以自行安装双系统,安装方法请自行搜索或参考右侧:双系统安装教程
2. 安装运行
我们提供了 ROS2 的接入功能包,用户需要在运行 ROS2 的系统上编译安装。
ROS2 接入包:点击前往下载
#解压缩sipeed-tofv075-ros2.zip,并进入目录
source /opt/ros/*/setup.sh
colcon build #(如提示缺少colcon时需要sudo apt install python3-colcon-ros)
source install/setup.sh
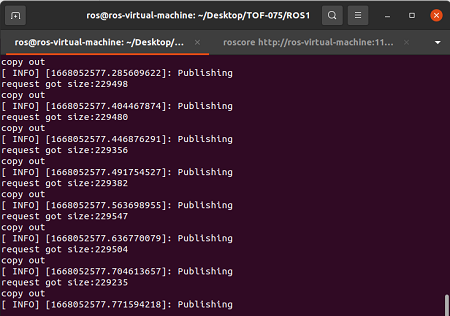
ros2 run sipeed_tof_cpp publisher
#之后终端会持续刷新显示[sipeed_tof]: Publishing,即正常工作
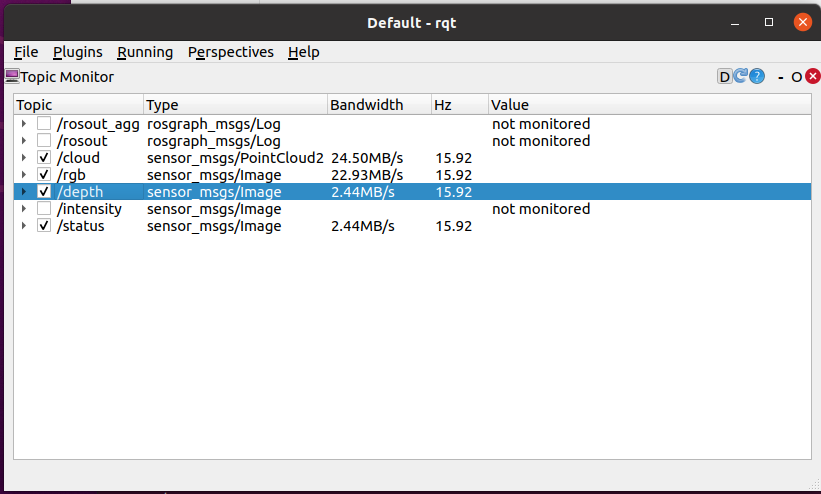
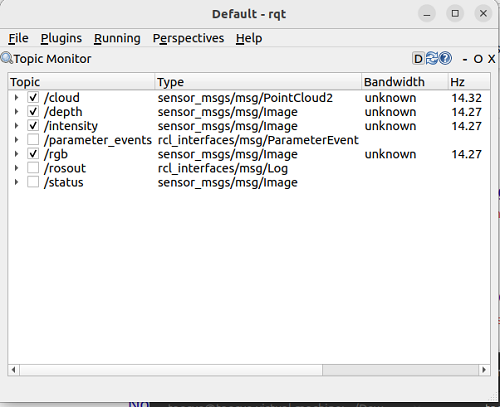
3. RQT 查看帧率
打开 RQT 后选择 Plugins->Topics->Topic Monitor。
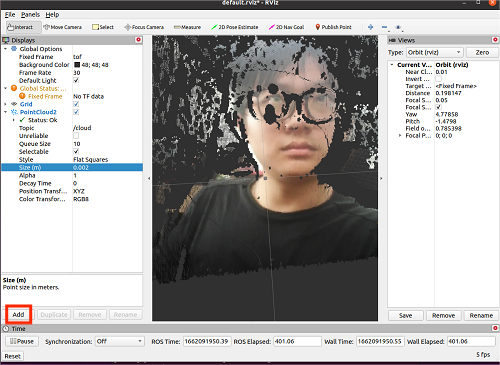
4. RVIZ2 预览
打开 rviz2 后,在界面左下角的 Add->By topic->PointCloud2 或 /depth、/intensity、/rgb->Image 添加->Display/Global Options/Fixed Frame 需要修改成 “tof” 才能正常显示点云。根据添加的内容左侧会显示 Image 而中间则显示点云。
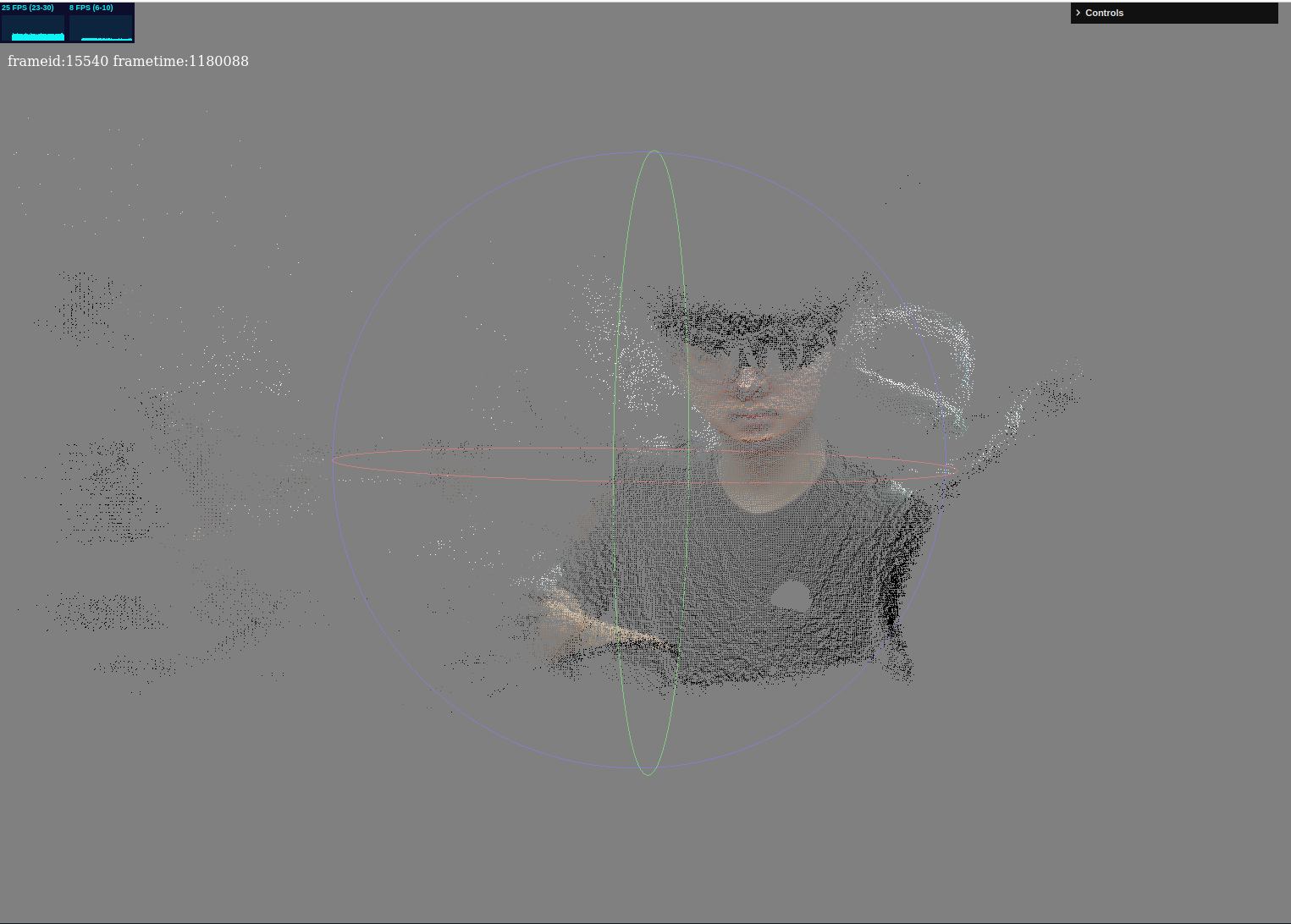
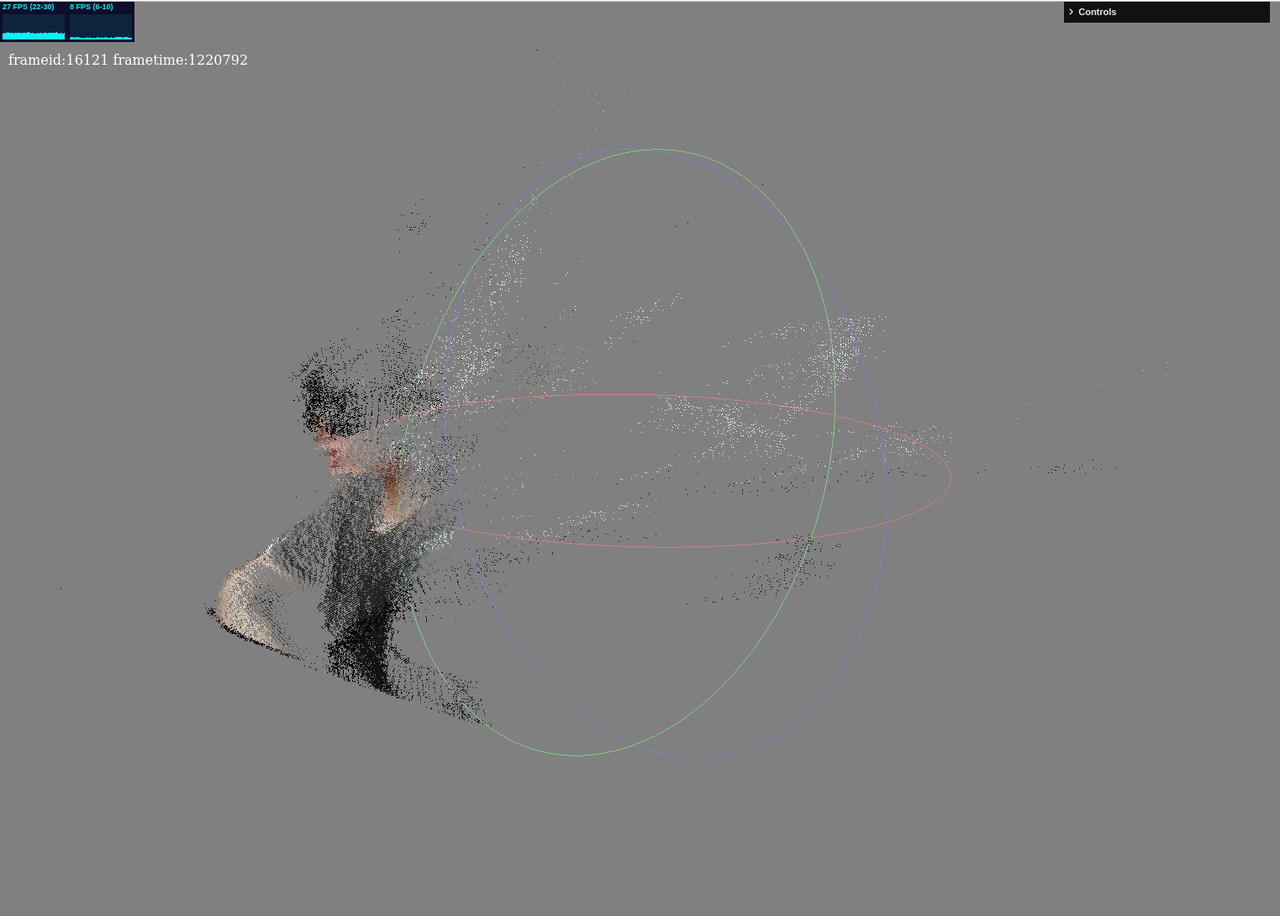
伪彩点云和 RGBD 融合的点云效果: