

 中文
中文系统开机与登录
注意:要求必须通过 12V DC 进行供电,否则仅通过 USB 会出现供电不足进而导致系统不稳定
开机前准备
开机前硬件准备:
- 12V DC 供电电源
- HDMI 线缆和显示器
- Type-C 线缆(可选:串口调试和登录)
- RJ45 网络线缆(可选:连接网络及 SSH 登录)
首次使用请根据您手上版本确认以下状态符合,否则系统无法正常使用
- 外壳上开关处于已打开状态(有外壳版本)
- Button 丝印处保持跳线帽短接(裸板版本)

正常开机
通过 HDMI1 连接显示器并接入 12V DC 供电,等待片刻约 20 多秒后显示器屏幕将会如下显示 LightDM 登录界面,表示系统启动成功。
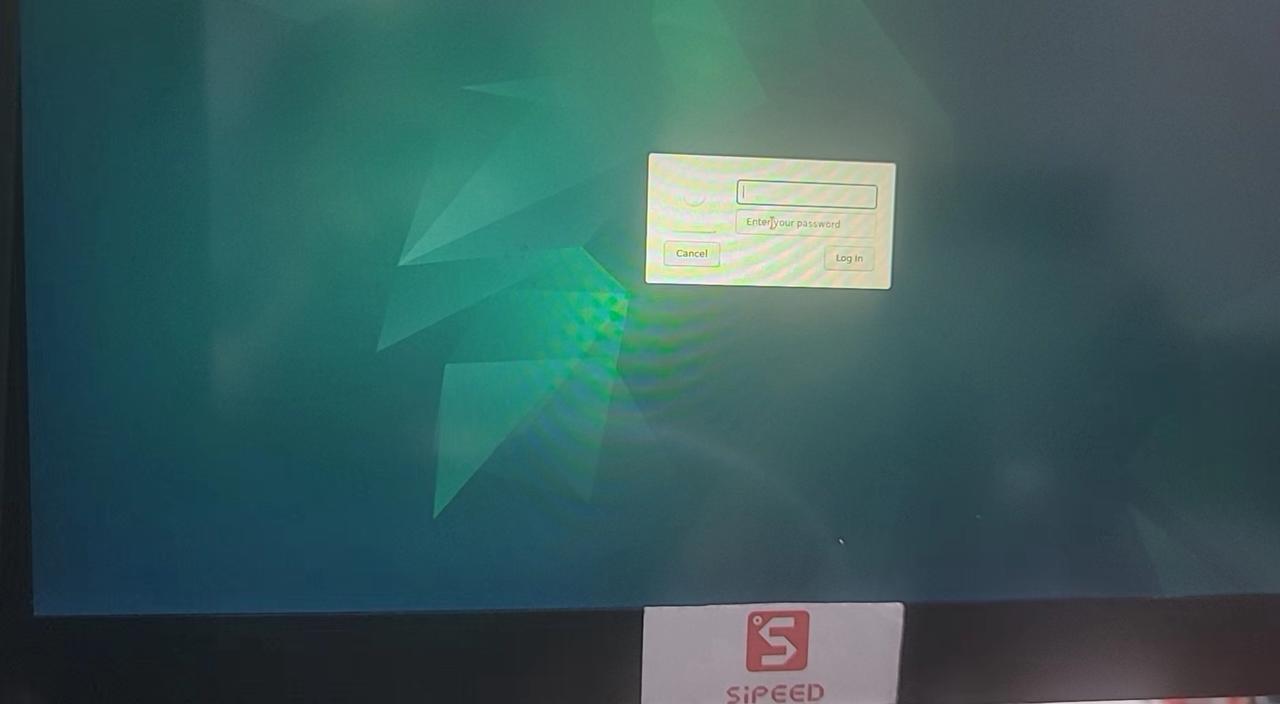
板载 USB-A 口连接鼠标、键盘,方便后续系统操作和输入。登录界面等待输入用户名和密码,默认都为 root,确认登录即可进入 Debian 桌面系统。
串口和SSH登录(进阶)
板载 USB Type-C 接口为默认调试串口,波特率相关配置为 115200 8n1。
用户可通过串口工具打开该串口,以查看内核调试信息,也可在此处通过用户名和密码直接登录系统终端进行命令操作。
由于 Debian 镜像在制作过程中为了控制大小方便版本分发,因此常用的板级软件开发工具并未预装,建议第一次使用的用户在通过调试串口登录之后,执行以下操作
- 通过网线连接以太网
- 执行以下命令,安装后续章节 DEMO 板上编译必备软件开发工具(
ifconfig、gcc/g++、cmake、libopencv......)
apt update
apt install build-essential
apt install libopencv-dev
apt install cmake
注意:本系统仅内置 root 超级用户,且考虑到安全性并未开启超级用户 SSH 密码登录。
若用户需要使用 SSH 登录 root 用户,推荐使用密钥登录,可以免输密码不仅方便快捷且安全。
所需操作如下:通过串口或桌面登录系统后,手动粘贴个人公钥保存到/root/.ssh/authorized_keys文件内,该文件不存在可手动创建。更详细过程可搜索 SSH 密钥登录或直接查看该教程。
交互式图像分割和修复(Segment and Inpaint Anything)
交互式图像分割和修复,基于QT的GUI交互界面,实现了交互式点选、框选的实时分割和进一步可选修复,具体效果预览和操作流程如下。
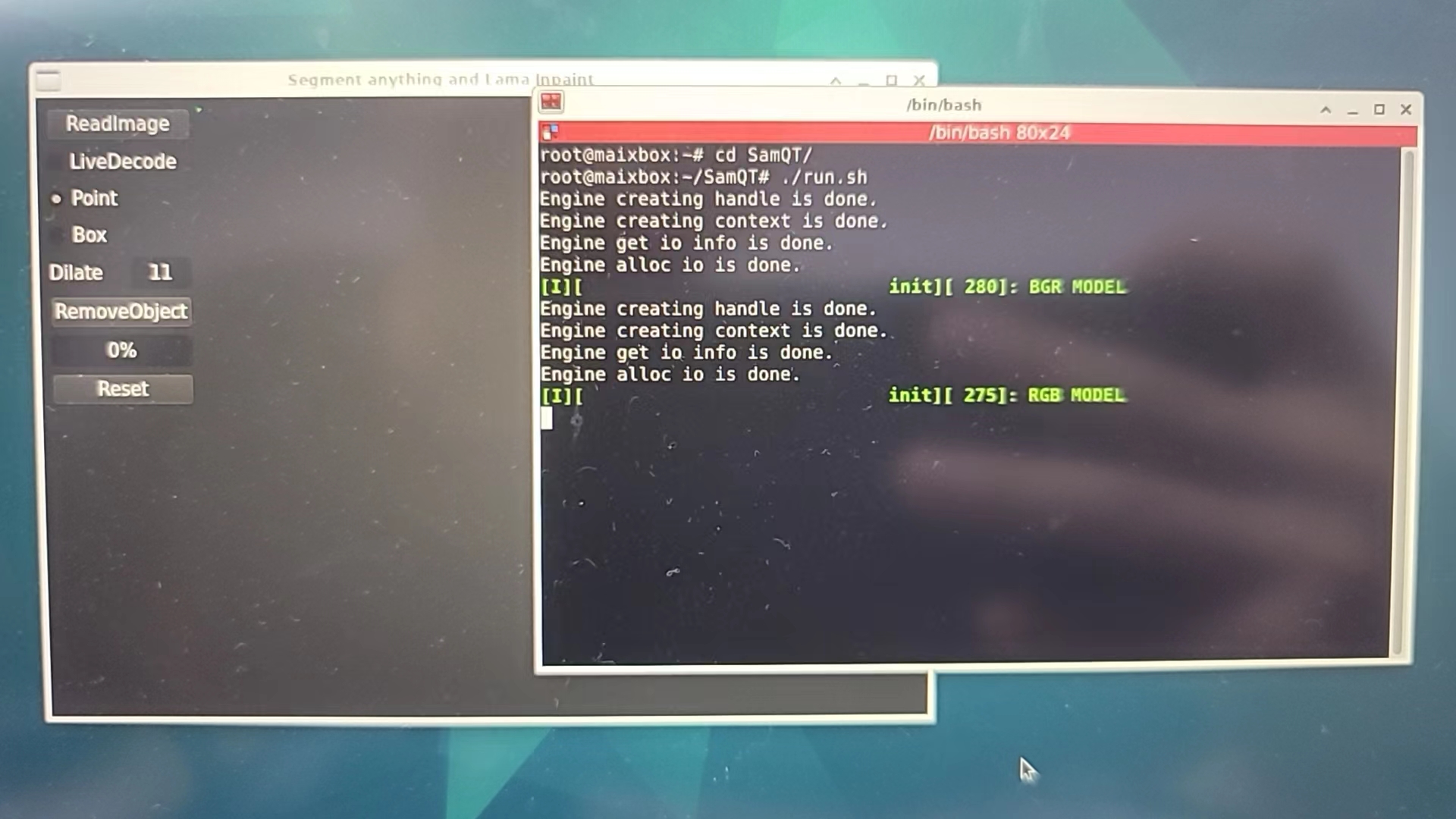
原始代码由爱芯官方开源于 GITHUB:SAM-ONNX-AX650-CPP 可下载官方预编译版本或按仓库内文档自行编译进行体验,下图是移除照片某球员的效果展示。
 |
 |
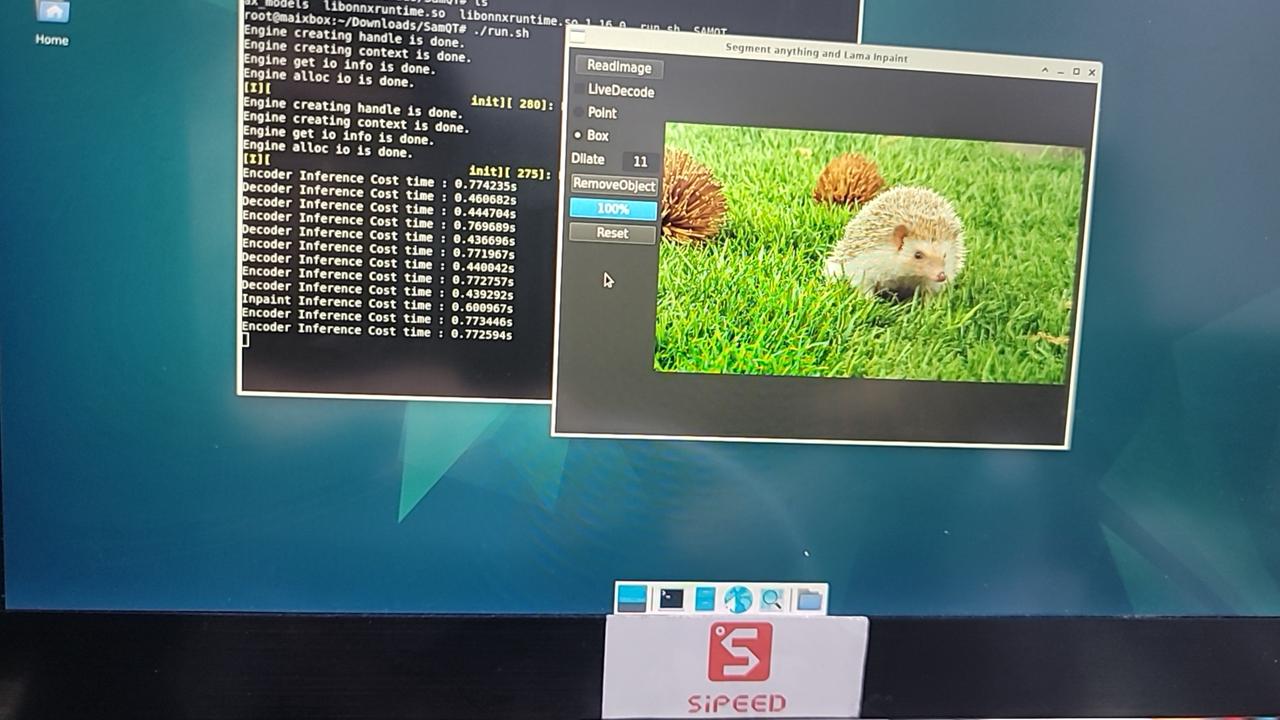
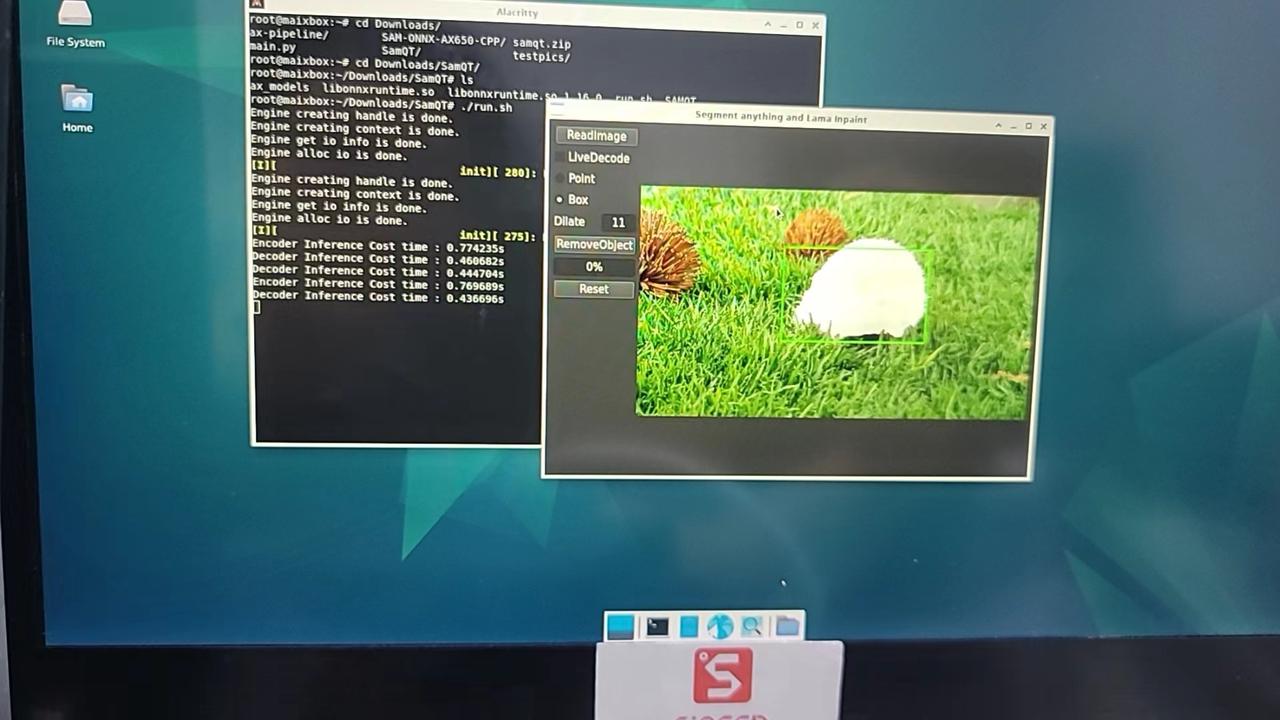
以下是实机操作画面。
 |
 |
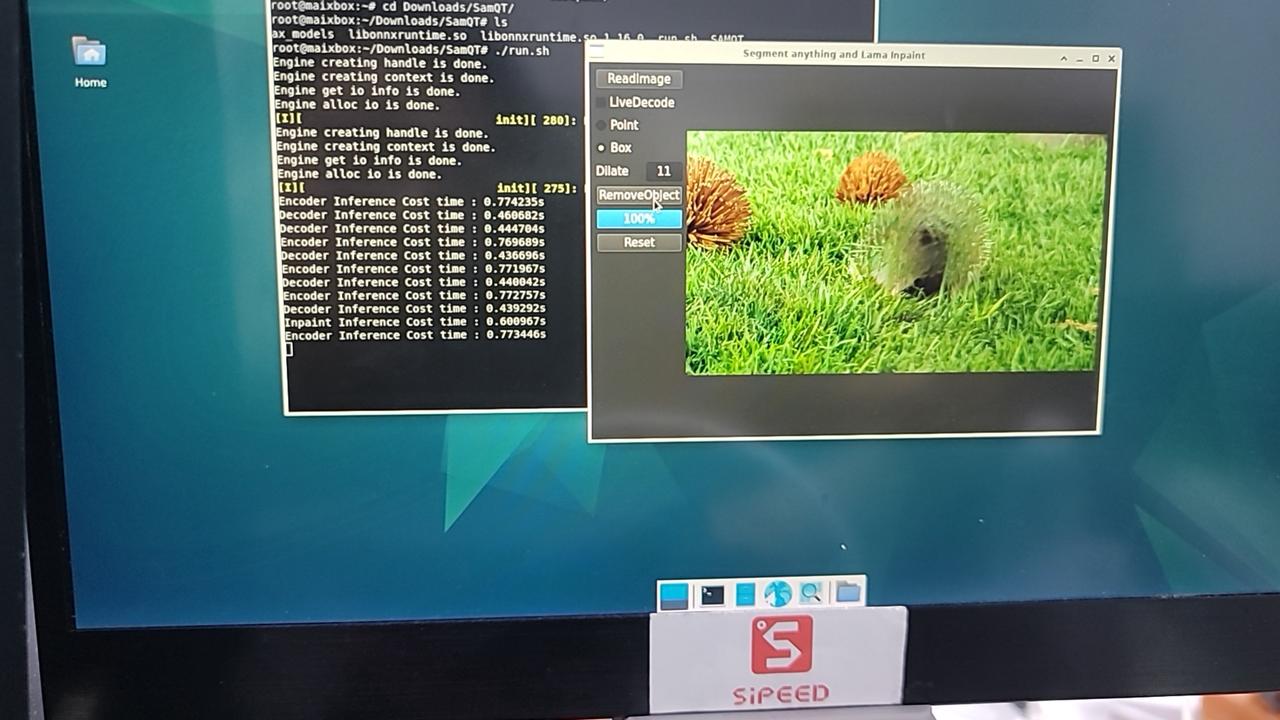 |
| RAW | SAM | Inpaint |
交互式以文搜图(CLIP)
交互式以文搜图示例,基于QT的GUI交互解码,采用 OpenAI 在 2021 年开源的 Zero-Shot 视觉分类模型 CLIP(Contrastive Language–Image Pre-training) 通过文本输入快速检索出相关图片并显示,支持中文、英文两种文本语言输入。
原始代码由爱芯官方开源于 GITHUB:CLIP-ONNX-AX650-CPP
准备 QT 运行环境
apt update
apt install cmake qt6-base-dev
下载预编译好的可执行文件、模型文件、测试图片、测试文本
将下载获得的 CLIP.zip 在 /root/Desktop/ 路径下解压得到以下内容
root@maixbox:~/Desktop/CLIP# tree -L 1
.
├── CLIPQT
├── cn_vocab.txt
├── coco_1000
├── libonnxruntime.so
├── libonnxruntime.so.1.16.0
├── onnx_models
├── run_en.sh
├── run_zh.sh
└── vocab.txt
使用 HDMI 基于 HDMI1 接口链接显示器并登录进入桌面, 打开控制终端运行 run_zh.sh
CLIP DEMO 正常运行
运行下列 DEMO 提前须知
默认是 HDMI1 是桌面,而以下的 DEMO 需要使用 HDMI0 输出画面,受限于显示驱动,它们之间存在冲突,即不能同时显示。
因此,若想运行后续 DEMO ,则要先杀掉 fb_vo 这个进程,ps aux|grep fb_vo找到进程号后kill -9 实际pid杀掉即可,此时 HDMI1 的桌面将停止刷新(停止下列 Demo 后,执行 /root/runVoHook.sh即可恢复桌面使用)。
然后,在通过 ssh 或者串口的命令行里面执行对应的 run.sh,这时候接到 HDMI0 的显示器就会正常出显示画面了
32路AI BOX(人车检测)
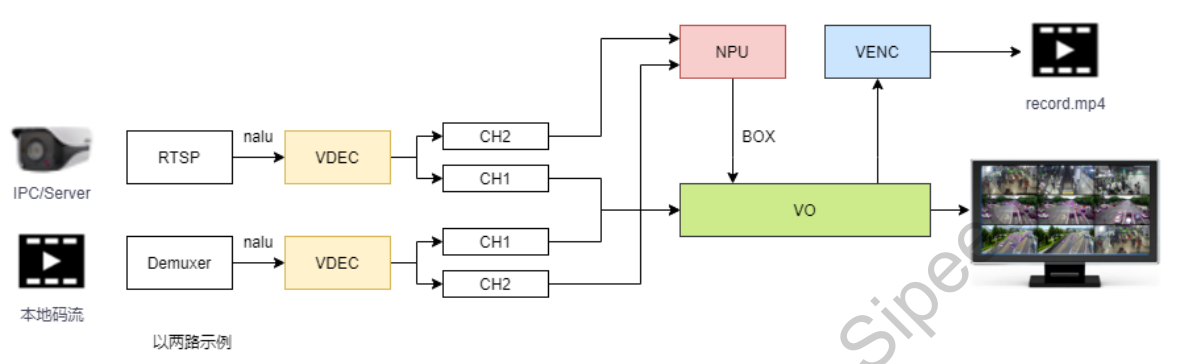
BoxDemo 是本机搭载的 BOX 产品类的演示应用程序,包括从 ××H264/H.265×× 视频解码,经 AI 全结构化检测,最后经 HDMI 显示的 PIPE 流程。
/opt/bin/BoxDemo/run.sh为启动脚本。需要连接 HDMI0 到显示器,默认数据流是视频文件输入 经AI运算和视频处理后输出到 HDMI0 单显 32 路(6x6 布局,最后4路为无信号窗口)。支持双屏 HDMI (支持同显和异显),此时实际测量整机功耗为不到 7W。
该应用原理为输入 32 路视频复制为共 64 通道,其中32通道为 472 x 264 分辨率输出 HDMI 缩放拼接供显示,剩余32通道为 1024 x 576 分辨率同步输入加载所选模型的 NPU 进行 AI 分析并将结果按需反馈到前 32 路对应视频流。目前仅使用了 3.6T(三分之一性能)算力轻松覆盖使用, 帧率15到20,瓶颈在于 CPU 的前后处理任务。另可额外再开启编码功能用于本地存储或网络推流。
如需要修改输入为 RTSP 流,请手动修改/opt/bin/BoxDemo/box.conf文件中streamxx行为有效 RTSP 地址。
如需要双屏显示,请手动修改/opt/bin/BoxDemo/box.conf文件中DISP1值为1,代表额外输出到 HDMI1。
视频流示意图如下:

DINO v2 单目深度估计(Depth Estimation)
DINO v2 单目深度估计,仅使用单颗彩色摄像头,使用 Facebook 的 DINO v2 大模型提取多维度视觉特征,并搭配下游模型进行估算场景相对深度
cd ~/ax-pipeline/bin
./sample_multi_demux_ivps_npu_multi_rtsp_hdmi_vo \
-p ./config/dinov2_depth.json \
-f ~/boxvideos/13.mp4
注:可指定其它 H.264 编码的视频文件或者 RTSP 流。
基于 Facebook 开源大模型 DINOv2 的深度估计移植效果预览。
 |
 |

YOLOv5 行人检测追踪(Pedestrian Detection,Person re-identification)
cd ~/ax-pipeline/bin
./sample_multi_demux_ivps_npu_multi_rtsp_hdmi_vo \
-p ./config/yolov5_seg.json \
-f ~/boxvideos/25.mp4

