
 English
EnglishMaixCAM MaixPy Face 478 Keypoints Detection
Update history
| Date | Version | Author | Update content |
|---|---|---|---|
| 2025-01-08 | v1.0 | neucrack | Add face 478 landmarks detection source code, documentation and demo. |
Introduction
In the previous article Face Detection, we introduced how to detect faces and a few keypoints (e.g., 5 keypoints). This article explains how to detect more keypoints.
More keypoints have a wide range of applications, such as expression detection, facial feature recognition, face swapping, and more.
Using Face Keypoints Detection in MaixPy
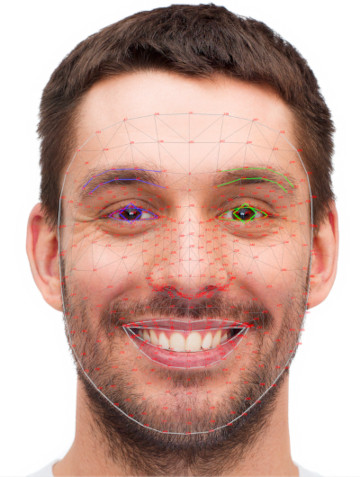
MaixPy integrates MediaPipe's 478 face keypoints detection, with the results as shown below:

Video demonstration:
Code Usage
To use this feature, MaixPy version must be >= 4.10.0. Refer to the latest code in MaixPy/examples:
from maix import camera, display, image, nn, app
detect_conf_th = 0.5
detect_iou_th = 0.45
landmarks_conf_th = 0.5
landmarks_abs = True
landmarks_rel = False
max_face_num = 2
detector = nn.YOLOv8(model="/root/models/yolov8n_face.mud", dual_buff=False)
landmarks_detector = nn.FaceLandmarks(model="/root/models/face_landmarks.mud")
cam = camera.Camera(detector.input_width(), detector.input_height(), detector.input_format())
disp = display.Display()
while not app.need_exit():
img = cam.read()
results = []
objs = detector.detect(img, conf_th=detect_conf_th, iou_th=detect_iou_th, sort=1)
count = 0
for obj in objs:
img_std = landmarks_detector.crop_image(img, obj.x, obj.y, obj.w, obj.h, obj.points)
if img_std:
res = landmarks_detector.detect(img_std, landmarks_conf_th, landmarks_abs, landmarks_rel)
if res and res.valid:
results.append(res)
count += 1
if count >= max_face_num:
break
for res in results:
landmarks_detector.draw_face(img, res.points, landmarks_detector.landmarks_num, res.points_z)
disp.show(img)
Explanation of Key Points
max_face_num: Limits the maximum number of faces detected to prevent lag due to too many faces in the frame.landmarks_abs: Specifies the coordinates of face keypoints in the originalimg. Thepointsvariable contains 478 keypoints in the orderx0, y0, x1, y1, ..., x477, y477.landmarks_rel: Outputs coordinates inimg_stdand appends the results to thepointsvariable.points_z: Represents depth estimation of the keypoints relative to the face's center of gravity. The closer to the camera, the larger the value. If behind the face's center, the value is negative. The values are proportional to the face's width.
Extracting Partial Keypoints
The 478 keypoints may be excessive for some applications. If you only need specific ones, you can select them based on the high-resolution image index. Common subsets include:
Note: These are for reference only. Please rely on the actual model output for accuracy.
- 146 Keypoints:
sub_146_idxes = [0, 1, 4, 5, 6, 7, 8, 10, 13, 14, 17, 21, 33, 37, 39, 40, 46, 52, 53, 54, 55, 58, 61, 63, 65, 66, 67, 70, 78, 80,
81, 82, 84, 87, 88, 91, 93, 95, 103, 105, 107, 109, 127, 132, 133, 136, 144, 145, 146, 148, 149, 150, 152, 153,
154, 155, 157, 158, 159, 160, 161, 162, 163, 168, 172, 173, 176, 178, 181, 185, 191, 195, 197, 234, 246, 249,
251, 263, 267, 269, 270, 276, 282, 283, 284, 285, 288, 291, 293, 295, 296, 297, 300, 308, 310, 311, 312, 314,
317, 318, 321, 323, 324, 332, 334, 336, 338, 356, 361, 362, 365, 373, 374, 375, 377, 378, 379, 380, 381, 382,
384, 385, 386, 387, 388, 389, 390, 397, 398, 400, 402, 405, 409, 415, 454, 466, 468, 469, 470, 471, 472, 473,
474, 475, 476, 477]
- 68 Keypoints:
sub_68_idxes = [162, 234, 93, 58, 172, 136, 149, 148, 152, 377, 378, 365, 397, 288, 323, 454, 389, 71, 63, 105, 66, 107, 336,
296, 334, 293, 301, 168, 197, 5, 4, 75, 97, 2, 326, 305, 33, 160, 158, 133, 153, 144, 362, 385, 387, 263, 373,
380, 61, 39, 37, 0, 267, 269, 291, 405, 314, 17, 84, 181, 78, 82, 13, 312, 308, 317, 14, 87]
- 5 Keypoints:
sub_5_idxes = [468, 473, 4, 61, 291]
With these indices, you can use the following code to extract and display specific subsets of keypoints:
def get_sub_landmarks(points, points_z, idxes):
new_points = []
new_points_z = []
for i in idxes:
new_points.append(points[i * 2])
new_points.append(points[i * 2 + 1])
new_points_z.append(points_z[i])
return new_points, new_points_z
sub_xy, sub_z = get_sub_landmarks(res.points, res.points_z, sub_146_idxes)
landmarks_detector.draw_face(img, sub_xy, len(sub_z), sub_z)
