
 中文
中文MaixPy MaixCAM 人手部 21 个关键点三维坐标检测
更新历史
| 日期 | 版本 | 作者 | 更新内容 |
|---|---|---|---|
| 2024-12-31 | v1.0 | neucrack | 添加源码、模型、例程和文档 |
简介
在一些应用中我们需要检测手的位置,或者手的姿态时,可以使用本算法,此算法可以检测到:
- 手的位置,提供四个顶点坐标。
- 手的 21 个关键点坐标,以及每个点相对手掌的深度估计。
应用举例:
- 点读机
- 手势控制
- 手指类游戏
- 手语转译
- 施魔法
效果图如下:

效果视频:
21 个关键点包括:
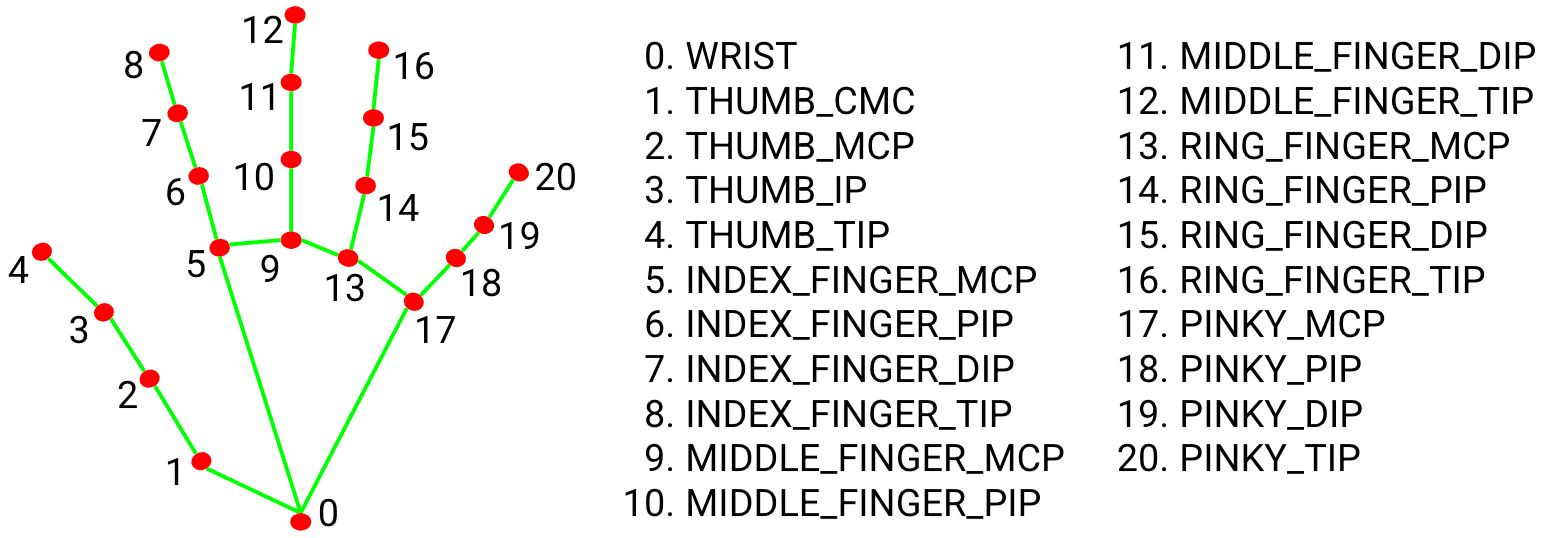
MaixPy MaixCAM 中使用手关键点检测
在 MaixPy 中已经内置了该算法(移植于 mediapipe,有兴趣可自行学习),可以方便地使用(固件版本必须 >= 4.9.3),此例程也可以在MaixPy/examples目录中找到:
from maix import camera, display, image, nn, app
detector = nn.HandLandmarks(model="/root/models/hand_landmarks.mud")
# detector = nn.HandLandmarks(model="/root/models/hand_landmarks_bf16.mud")
landmarks_rel = False
cam = camera.Camera(320, 224, detector.input_format())
disp = display.Display()
while not app.need_exit():
img = cam.read()
objs = detector.detect(img, conf_th = 0.7, iou_th = 0.45, conf_th2 = 0.8, landmarks_rel = landmarks_rel)
for obj in objs:
# img.draw_rect(obj.x, obj.y, obj.w, obj.h, color = image.COLOR_RED)
msg = f'{detector.labels[obj.class_id]}: {obj.score:.2f}'
img.draw_string(obj.points[0], obj.points[1], msg, color = image.COLOR_RED if obj.class_id == 0 else image.COLOR_GREEN, scale = 1.4, thickness = 2)
detector.draw_hand(img, obj.class_id, obj.points, 4, 10, box=True)
if landmarks_rel:
img.draw_rect(0, 0, detector.input_width(detect=False), detector.input_height(detect=False), color = image.COLOR_YELLOW)
for i in range(21):
x = obj.points[8 + 21*3 + i * 2]
y = obj.points[8 + 21** + i * 2 + 1]
img.draw_circle(x, y, 3, color = image.COLOR_YELLOW)
disp.show(img)
检测的结果用了draw_hand这个函数来画,你可以从obj.points得到所有关键点信息,一共4 + 21个点,格式为:
- 前 4 个点是手外框的四个角坐标,从左上角开始,逆时针4个点,
topleft_x, topleft_y, topright_x, topright_y, bottomright_x, bottomright_y, bottomleft_x, bottomleft_y,注意值可能会小于0. - 后 21 个点是手部的关键点,如简介中所说的顺序,格式:
x0, y0, z0, x1, y1, z1, ..., x20, y20, z20,其中z为相对于手掌的深度信息。注意值可能会小于 0。
另外obj的x, y, w, h, angle 属性也可以直接使用,分别代表了旋转前的框坐标和大小,以及旋转角度(0到360度)。
精度优化:这里使用了nn.HandLandmarks这个类来进行检测,默认用了int8量化的模型,速度会更快,如果需要更高的精度可以更换为hand_landmarks_bf16.mud这个模型。
得到相对于手左上角顶点的关键点坐标:你可以选择得到相对于手左上角顶点的关键点坐标值,值范围为 0 到 手框宽度(obj.w),方法:
objs = detector.detect(img, conf_th = 0.7, iou_th = 0.45, conf_th2 = 0.8, landmarks_rel = True)
这里landmarks_rel 参数就是告诉这个函数输出21个点相对于手左上角顶点的相对坐标,在obj.points最后21x2个值x0y0x1y1..x20y20排列。
进阶:基于关键点检测实现手姿态识别
举个例子,比如我们要实现检测石头剪刀布检测,有两种方法:
- 方法1: 直接根据关键点进行判断,使用代码判断手的形状,比如手指张开,手掌朝上,手掌朝下等等。
- 方法2: 使用 AI 模型进行分类。
方法1是传统的方法,简单快速,在简单的手势判断比较稳定,这里主要说方法2:
方法2 即用训练一个分类模型来对手势分类,不过可能需要大量图片和背景来训练,我们在此有两个优化方案:
- 使用检测手的模型比如 YOLO11 先检测手,再裁切出只有手的部分,再训练分类模型,这样分类模型的输入只有手部分,减少了干扰。
- 使用手关键点检测,得到关键点数据,用这 21 个关键点数据作为分类模型的输入进行分类,这样直接没有了背景信息,更加准确!
所以这里主要采用的就是思路 2,将关键点信息作为分类模型的输入,因为没有图片背景信息干扰,只需要采集比较少量的数据就能达到比较好的效果。
步骤:
- 确定分类的手势,比如石头剪刀布三个分类。
- 修改上面的代码,比如点击屏幕一下就记录下当前手的关键点信息到文件系统存起来。
- 修改上面的代码,为了让分类模型输入更统一,你可以选择得到相对于手左上顶点的关键点坐标值,值范围为
0到 手框宽度(obj.w),参考上面landmarks_rel参数。 - 分别采集这几个分类的数据。
- 在电脑上创建一个分类模型,比如基于 mobilenetv2 的分类模型,使用 pytorch 进行训练,实际输入还可以将坐标都归一化到[0, 1]。
- 分类模型训练完成后导出成 MaixCAM 支持的格式(量化数据需要先打包成
npz格式)。 - 在 MaixPy 中检测手之后,得到关键点再运行分类模型进行得到结果,代码可以参考例程中的
nn_forward.py和nn_custom_classifier.py。
这样就可以以很少的训练数据训练不同手势了,这种方式要求你会训练分类模型,以及量化转换模型格式。
进阶:基于关键点检测实现手姿态识别之--模型训练简易版本
上面的方法需要你会自己使用 pytorch 修改训练模型,以及量化转模型格式比较麻烦。
这里提供另外一种简单很多的曲线救国的方式,无需自己搭建环境训练和模型转换:
- 同上一个方法获取手相对于手左上角顶点的坐标。
- 基于这些点生成一幅图,不同的点可以用不同的颜色,具体请自行思考和尝试生成什么样的图比较好。
- 将生成的图片上传到MaixHub.com 创建分类模型项目,在线训练,选择 MaixCAM 平台。
- 一键训练,完成后得到模型,后台会自动训练并转换成 MaixCAM 支持的格式。
- 修改例程,识别到关键点后,按照同样的方法生成图片,然后传给你训练的分类模型进行识别得到结果。
进阶:基于关键点检测实现手动作识别之--复杂动作
上面的是简单的动作,是单张图片识别,如果想时间轴维度上识别,比如识别画圆圈动作:
- 一种方法是把历史关键点存在队列中,根据队列中的关键点数据用代码来判断动作。
- 另外一种是将历史关键点作为一个序列输入到分类模型中,这样分类模型就可以识别时间轴上的动作了。
- 还可以将历史关键点合成一张图片给分类模型也可以。
