
 中文
中文MaixCAM MaixPy UART 串口使用介绍
更新历史
| 日期 | 版本 | 作者 | 更新内容 |
|---|---|---|---|
| 2025-08-08 | 1.2.0 | Neucrack | 添加 MaixCAM2 支持 |
| 2024-08-01 | 1.1.0 | Neucrack | 优化文档,更多详细内容 |
| 2024-03-07 | 1.0.0 | Neucrack | 初版文档 |
前置知识
请先学会使用pinmap 模块设置引脚功能。
要让一个引脚能使用 UART 功能,先用pinmap设置对应引脚功能为UART。
串口简介
串口是一种通信方式,包含了硬件和通信协议的定义。
- 硬件包括:
- 3 个引脚:
GND,RX,TX,通信双发交叉连接RXTX, 即一方TX发送到另一方的RX, 双方GND连接到一起。 - 控制器,一般在芯片内部,也叫
UART外设,一般一个芯片有一个或者多个UART控制器,每个控制器有相对应的引脚。
- 3 个引脚:
- 串口通信协议: 为了让双方能顺利通信,规定了一套协议,即以什么样的时序通信,具体可以自行学习,常见的参数有 波特率 校验位等,波特率是我们用得最多的参数。
通过板子的串口,可以和其它单片机或者 SOC 进行数据通信,比如可以在 MaixCAM 上实现人体检测功能,检测到坐标后通过串口发送给 STM32/Arduino 单片机。
选择合适的 I2C 使用
首先我们需要知道设备有哪些引脚和 I2C,如图:
| 设备型号 | 引脚简图 | 引脚复用说明 |
|---|---|---|
| MaixCAM | 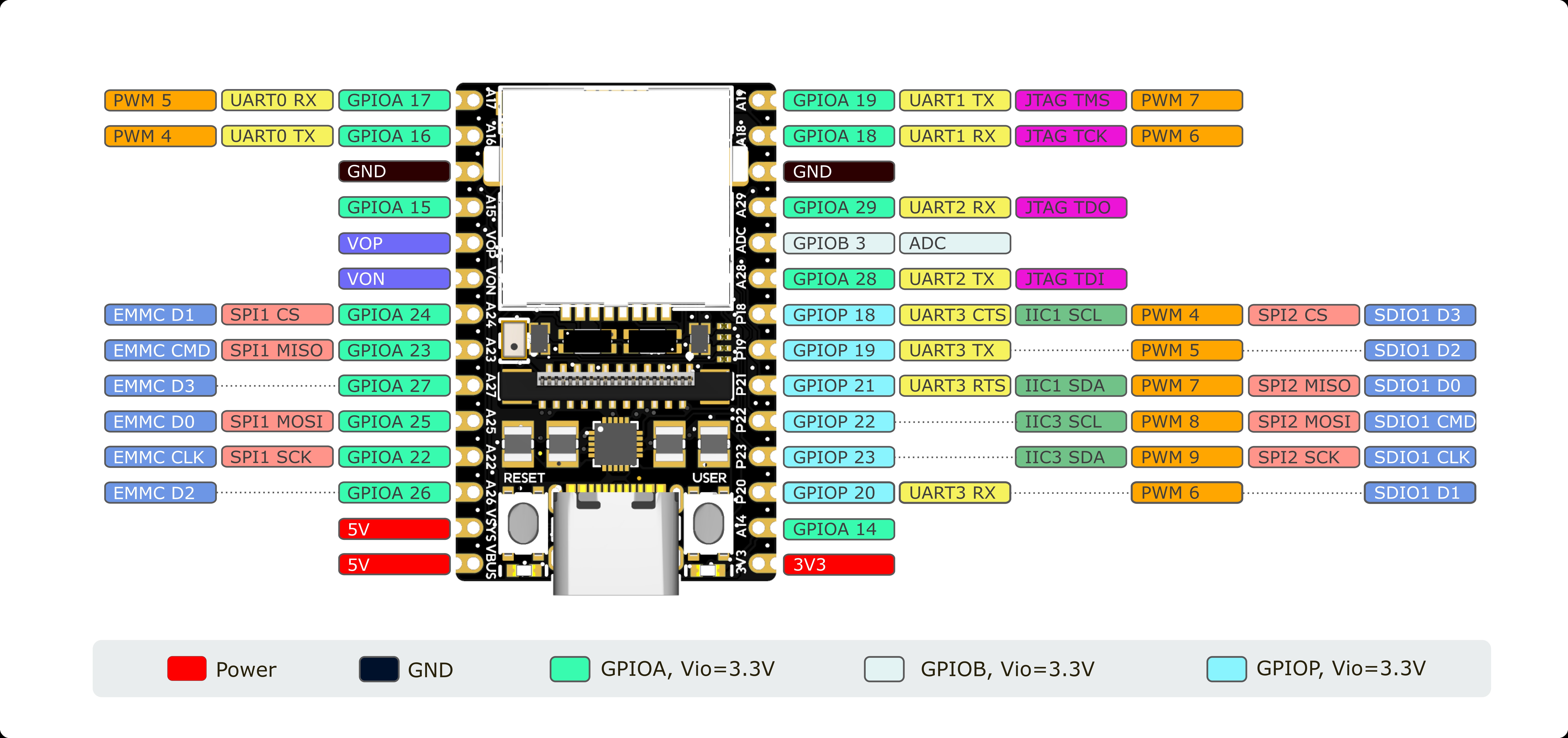 |
板子丝印比如A19是引脚名,UART1_TX是功能名 |
| MaixCAM-Pro | 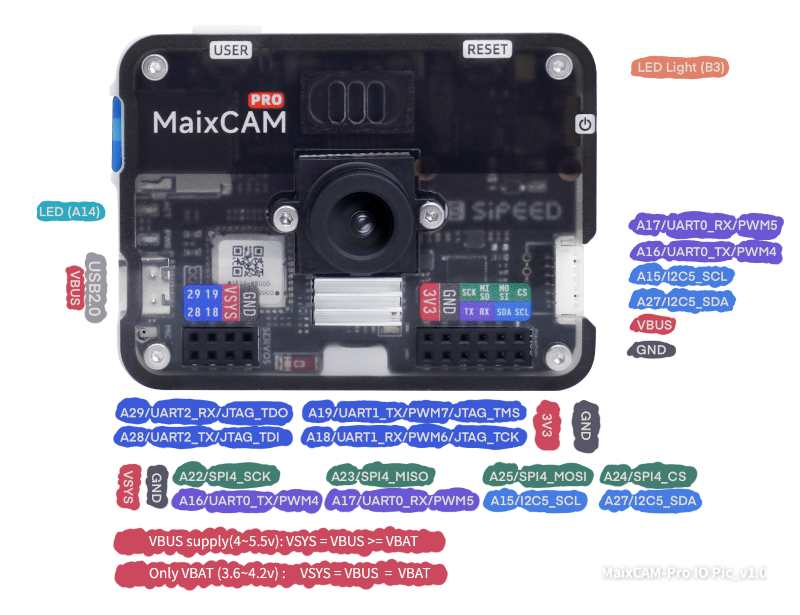 |
第一个名如A19是引脚名,对应UART1_TX是功能名 |
| MaixCAM2 | 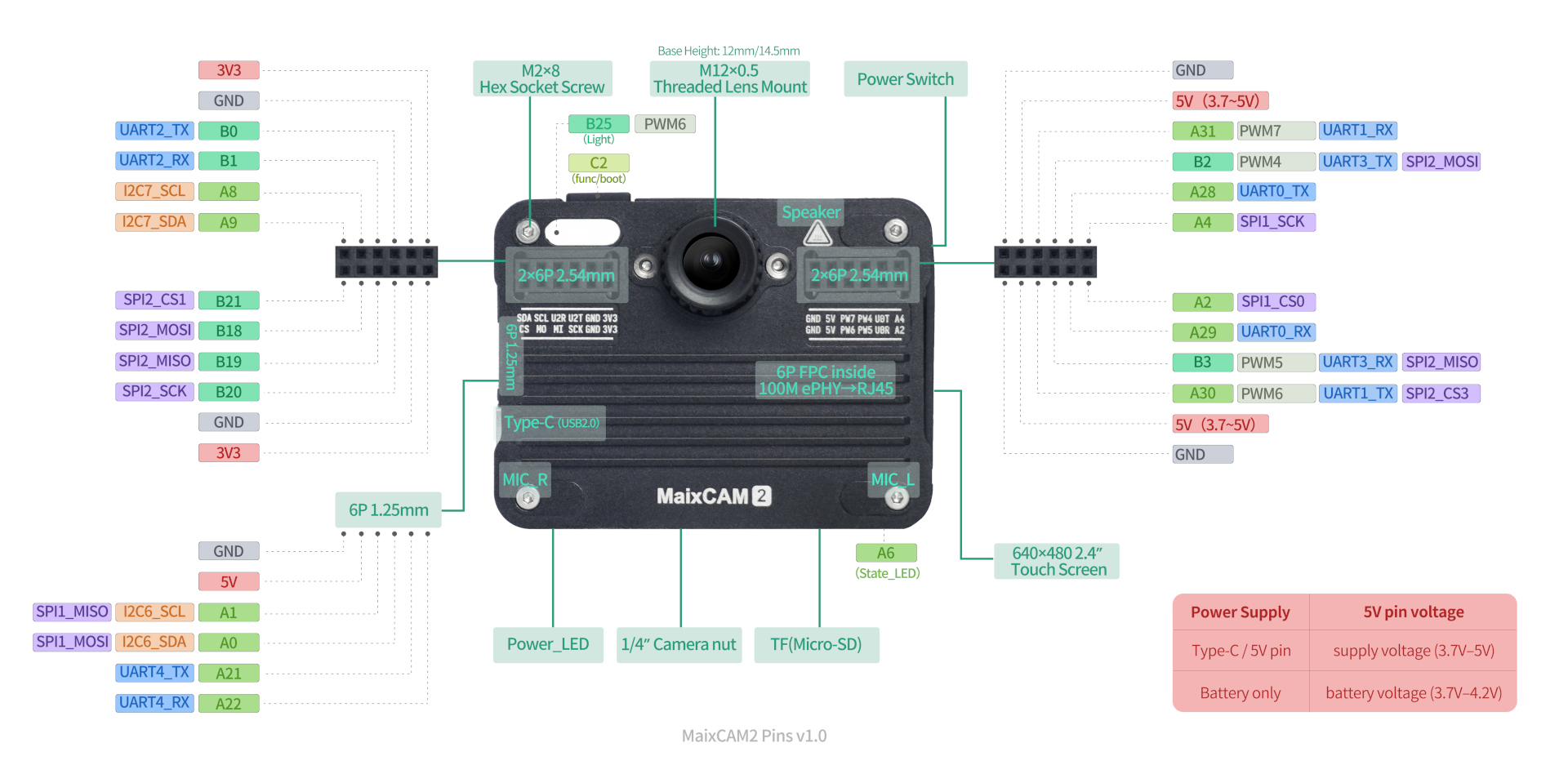 |
第一个名如A21是引脚名,对应UART4_TX是功能名 |
需要注意的是,引脚默认可能用做其它用途,最好避开这些引脚,请看pinmap 文档中的说明。
MaixCAM/MaixCAM-Pro 串口使用注意点:
- 默认从 USB 口引出了一个串口0,可以插上配套的 Type-C 转接小板,就能直接使用上面的串口引脚,也可以不用转接板,直接使用板子上的
A16(TX)和A17(RX)引脚, 和 USB 口引出的是同样的引脚,是等效的。 - 对于 MaixCAM 使用 USB 引出的串口时需要注意,Typc-C 正插和反插,转接小板上的
RX和TX会交换(默认 Type-C 母口朝前和丝印符合),所以当你发现无法通信时,有可能就是 RX TX 反了,可以尝试将 Type-C 翻转一面插再看看通信是否正常。这个算是设计缺陷,不过一般也不会经常拔插所以适应一下也能接受。 - MaixCAM 的
串口0在开机时会打印一部分开机日志, 启动完毕后会打印serial ready字样,如果和单片机通信需要注意丢弃这部分信息,如果出现系统启动出现问题也可以通过查看串口0的开机打印来诊断问题。 - MaixCAM 的
TX(UART0) 引脚也是启动模式检测引脚之一,所以在串口0开机时不能是被拉低的状态,不然会导致无法开机,是芯片的特性,如果你在做3.3v转5v的电平转换电路要十分注意不要默认拉低请保持浮空(可以考虑使用电平转换芯片)。以及如果你发现无法开机,也可以先检查一下TX是否被拉低了。 - 综上,
UART0如果你遇到了问题不好解决,建议使用其它串口比如UART1。 UART0也是系统默认maix protocol串口。
MaixCAM2 使用注意点
MaixCAM2引出的串口很多,有UART0 / UART1 / UART2 / UART3 / UART4共 4 组串口,使用时不要混淆。UART0是系统终端和日志串口。
波特率限制
注意,不是所有波特率都能使用的,推荐没有特殊需求使用 115200,这是芯片都支持的,其它波特率误码率可能会很高或者驱动未支持导致数据传输丢失。
这里列举不同设备的常见测试可用波特率(欢迎PR):
MaixCAM / MaixCAM-Pro:115200。MaixCAM2:115200。理论最高能到4000000 bits/s,底层baud = uart_clk /(小数分频 * 16),默认uart_clk是200000000,小数分频值整数部分uart_clk / (baud * 16),小数部分round((uart_clk % (baud * 16)) * 16 / (baud * 16)) / 16,比如115200计算出来分频器设置为108.5,实际验证精度(115200 - (uart_clk / (108.5 * 16))) / 115200 = 0.0064%,所以如果你切换波特率,也可以根据这个公式进行计算精度。
串口硬件接线
两个设备通信, 接三个引脚,GND, RX, TX,通信双发交叉连接 RX TX, 即一方 TX 发送到另一方的 RX, 双方 GND 连接到一起即可。
MaixPy 中使用串口
将两个通信的板子双方连接好后(通信双发交叉连接 RX TX, 即一方 TX 发送到另一方的 RX, 双方 GND 连接到一起),就可以使用软件了。
通过 MaixPy 使用串口,核心代码:
from maix import uart
serial_dev = uart.UART("/dev/ttyS0", 115200)
serial_dev.write_str("Hello MaixPy")
/dev/ttyS0 是串口设备,可以通过print(uart.list_devices())看到所有串口设备。
一般/dev/ttyS*,*就是串口号。
对于默认对应引脚就是串口功能的串口可以这样直接使用,其它串口则需要先用pinmap映射引脚功能为对应的UART功能,然后创建UART对象即可:
from maix import uart, pinmap, time, sys, err
# ports = uart.list_devices() # 列出所有串口
# get pin and UART number according to device id
device_id = sys.device_id()
if device_id == "maixcam2":
pin_function = {
"A21": "UART4_TX",
"A22": "UART4_RX"
# "B0": "UART2_TX",
# "B1": "UART2_RX"
}
device = "/dev/ttyS4"
# device = "/dev/ttyS2"
else:
pin_function = {
"A16": "UART0_TX",
"A17": "UART0_RX"
# "A19": "UART1_TX"
# "A18": "UART1_RX",
}
device = "/dev/ttyS0"
# device = "/dev/ttyS1"
for pin, func in pin_function.items():
err.check_raise(pinmap.set_pin_function(pin, func), f"Failed set pin{pin} function to {func}")
# Init UART
serial_dev = uart.UART(device, 115200)
serial_dev.write_str("Hello MaixPy")
串口连接电脑
- 有开发者可能会问:为什么插上 USB 电脑没出现串口设备?
答: 因为设备的 USB 口是 USB 功能,不是 USB 转串口功能,而且默认会虚拟成 USB 网卡,如果要访问设备的终端,请使用 ssh 连接。
- 我想电脑和板子串口通信,怎么办?
答: 现代电脑一般只有 USB 口,所以想电脑和板子的 UART 通信,中间需要一个 USB 转 UART 的转接板,比如这个,USB 连接电脑,串口连接开发板的串口就能通信了。
- 我想在电脑看板子串口终端打印的日志,或者终端交互,怎么操作?
答:一般推荐通过网络 ssh 进行终端交互,如果遇到问题,可以用以下方法进入串口终端:
- 对于 MaixCAM/MaixCAM-Pro: 将 USB 转 UART 的转接板和板子的
串口0(A16(TX)和A17(RX))引脚交叉相连,提前将系统内/boot/uEnv.txt中的consoledev一行前面加#号注释掉或者直接删掉使能串口0作为终端,然后重启系统就能通过串口0看到开机日志和终端交互了。 - 对于 MaixCAM2: 将 USB 转 UART 的转接板和板子的
串口0(U0T/U0R)引脚交叉相连,就可以进行串口终端交互了,开机也会打印日志。
发送数据
主要有两个函数write_str和write函数。
write_str函数来发送字符串,write用来发送字节流,即str和bytes类型,两者可以互相转换,比如:
"A"调用encode()方法变成b"A",反过来b"A"调用decode()方法变成"A"。str没法显示一些不可见字符比如 ASCII 码中的值0,在字符串中也是\0一般作为结束符,在bytes类型中就可以用b"\x00"来储存。- 对于非 ASCII 编码的字符串更有用,比如
UTF-8编码中中文好是由三个字节\xe5\xa5\xbd来表示的,我们可以通过"好".encode("utf-8")得到b"\xe5\xa5\xbd",也可以通过b'\xe5\xa5\xbd'.decode("utf-8)得到"好"。
所以如果我们需要发送字节数据,则用write()方法发送即可, 比如:
bytes_content = b'\x01\x02\x03'
serial.write(bytes_content)
所以对于 str 类型,也可以不用write_str,而是使用serial.write(str_content.encode()) 来发送。
如果你有其它类型的数据,想将它们变成一个字符串发送,可以使用Python 字符串格式化来创建一个字符串,比如:
想发送I have xxx apple,这里xxx 想用一个整型变量,则:
num = 10
content = "I have {} apple".format(num)
content2 = f"I have {num} apple"
content3 = "I have {:04d} apple".format(num)
content4 = f"I have {num:d} apple"
print(content)
print(content2)
print(content3)
print(content4)
print(type(content))
serial.write_str(content)
另外你也可以把数据编码成二进制流数据发送,比如前 4 个字节是十六进制的 AABBCCDD,中间发送一个 int 类型的数值,最后再加一个0xFF结尾,使用struct.pack来进行编码(看不懂可以看后文的介绍):
from struct import pack
num = 10
bytes_content = b'\xAA\xBB\xCC\xDD'
bytes_content += pack("<i", num)
bytes_content += b'\xFF'
print(bytes_content, type(bytes_content))
serial.write(bytes_content)
这里 pack("<i", num) 把 num编码为int类型即4字节的有符号数,<符号意思是小端编码,低位在前,这里num = 10,十六进制 4 字节表示就是0x0000000A,小端就是把低字节0x0A放在前面,得到一个b'\x0A\x00\x00\x00'的字节类型数据。
这里只举例使用
i编码int类型的数据,还有其它类型比如B表示unsigned char等等,更多的struct.pack格式化用法可以自行搜索python struct pack。
这样最终发送的就是AA BB CC DD 0A 00 00 00 FF二进制数据了。
接收
使用read方法进行读取数据,直接:
while not app.need_exit():
data = serial.read()
if data:
print(data)
time.sleep_ms(1)
同样,read方法获得的数据也是bytes类型,这里read会读取对方一次性发送的一串数据,如果没有数据就是b''即空字节。
这里用了time.sleep_ms(1)进行睡眠了1ms,用来释放 CPU,不让这个线程占用所有 CPU 资源,而且1ms不影响我们程序的效率,特别是在多线程时有用。
另外read函数有两个参数:
len:代表想接收的最大长度,默认-1代表缓冲区有多少就返回多少,传>0的值则代表最多返回这个长度的数据。timeout:- 默认
0代表从缓冲区读取数据立马返回数据,如果len为-1则返回所有数据,如果指定了len则返回长度不超过len的数据。 <0代表一直等待直到接收到了数据才返回,如果len为-1则等待到接收到数据才返回(一串连续接收到的数据,即阻塞式读取所有数据),如果指定了len则等待接收数量达到len才返回。>0代表无论有没有接收到数据,超过这个时间就会返回。
- 默认
看起来有点复杂,常见的参数组合:
read(): 即read(-1, 0),从缓冲区读取收到的数据,通常是对方一次性发来的一串数据,等到对方没有发送(一个字符的发送时间内没有再发)就立刻返回。read(len = -1, timeout = -1): 阻塞式读取一串数据,等到对方发送了数据并且一个字符的发送时间内没有再发才返回。read(len = 10, timeout = 1000): 阻塞式读取 10 个字符,读取到 10 个字符或者 超过 1000ms 还没收到就返回已经收到的数据。
设置接收回调函数
在 MCU 开发中,串口收到数据通常会有中断事件发生, MaixPy 已经在底层处理好了中断,开发者无需再处理中断。
如果你想在接收到数据时调用一个回调函数,可以用set_received_callback设置回调函数:
from maix import uart, app, time
def on_received(serial : uart.UART, data : bytes):
print("received:", data)
# send back
serial.write(data)
device = "/dev/ttyS0"
serial = uart.UART(device, 115200)
serial.set_received_callback(on_received)
serial0.write_str("hello\r\n")
print("sent hello")
print("wait data")
while not app.need_exit():
time.sleep_ms(100) # sleep to make CPU free
在接收到数据后会在另外一个线程里调用设置的回调函数,因为是在另外的线程里调用的,所以不像中断函数要尽快退出函数,你可以在回调函数里处理一些事务再退出也是可以的,注意多线程常见问题。
使用回调函数的方式接收数据请不要再使用read函数读取,否则会读取出错。
更多串口例程
串口API 文档
更多 API 看 UART API 文档
应用层通信协议
概念和字符协议
串口只是规定了保证硬件通信的时序,为了让接收方知道发送方发送的字符流的含义,我们一般会规定一个应用通信协议。
比如发送放需要发送一个坐标,包含了x, y两个整型值,为了让接收方能理解我们发送的字节流的含义,我们规定:
- 帧头:当我开始发送
$符号时,就代表我要开始发送有效的数据啦。
内容:设计一个开头符号的原因是串口是流式传输,比如发送两次
12345有可能在某个时刻接收到了12345123这样的数据,第二帧的45还没有接收到,我们可以根据起始和结尾符号来判断一个完整的数据帧。
- x, y 的取值范围是 0~65535, 即两个字节的无符号短整型(
unsinged short),我会先发 x 再发 y,用逗号隔开,比如10,20。 - 帧尾:最后我会再发一个
*标记来代表我这次数据发送完成了。
这样发送一次数据就类似$10,20*这样一个字符串,对方如果用 C 语言接收和解析:
// 1. 接收数据
// 2. 根据帧头帧尾判断是否接收完毕了,并将完整的一帧数据存到 buff 数组里面
// 3. 解析一帧数据
uint16_t x, y;
sscanf(buff, "$%d,%d*", &x, &y);
这样我们就制定了最简单的字符通信协议,具有一定的可靠性。
但是由于我们串口一般用的参数是115200 8 N 1,这里的N就是无奇偶校验,我们可以在自己的协议里面加一个校验值放在末尾,比如:
- 这里我们规定 x,y 后还有一个校验值,取值范围是 0 到 255,它的值为前面所有字符加起来的和对 255 取余。
- 这里以
$10,20举例,在Python只需要使用sum函数就可以sum(b'$10,20') % 255 --> 20,最终发送$10,20,20*。 - 接收放接收到数据后读取到校验值
20,然后自己也同样的方式计算一遍$10,20的校验值,如果也是20说明数据传输没有发生错误,如果不相同我们则可以认为数据传输过程中发生了错误,可以丢弃等下一个数据包。
比如在 MaixPy 中,我们需要编码一个字符协议,直接使用 Python 的字符串格式化功能即可:
x = 10
y = 20
content = "${},{}*".format(x, y)
print(content)
二进制通信协议
上面的字符协议有个很明显的特征,我们都是用可见字符的方式在传输数据,传输数据时有点就是简单,人眼能直接看懂;
缺点就是占用字符数量不固定,数据量比较大,比如$10,20*和$1000,2000*,同样的格式,数值不同长度不同,这里1000用了 4 个字符也就是4个字节,我们都知道一个无符号短整型(uint16)类型的数据只需要两个字节就能表示0~65535的取值范围,用这种表示方法可以少传输数据。
我们也知道可见字符可以通过ASCII码表转换成二进制表示形式,比如$1000查找ASCII码表换成二进制表示就是0x24 0x31 0x30 0x30 0x30一共 5 个字节,也就是我们实际传输数据的时候传输的二进制内容,如果现在我们用二进制的方式直接编码1000,即0x03E8,就可以直接发送0x24 0x03 0xE8,最终只需要发送 3 个字节,减少了通信开销。
另外这里0x03E8两个字节低位是0xE8,先发送低位0xE8我们称之为小端编码,反之则是大端编码,两个皆可,双方规定一致即可。
在 MaixPy 中,要将一个数值转换成 bytes 类型也很简单,使用struct.pack函数即可,比如这里的0x03E8也就是十进制的1000,我们用
from struct import pack
b = pack("<H", 1000)
print(b)
这里<H表示小端编码,H表示一个 uint16类型的数据,最终得到b'\xe8\x03'的 bytes 类型数据。
同样的,二进制协议也可以有 帧头,数据内容,校验值,帧尾等,也可以不要帧尾,而是设计一个帧长的字段,看个人喜好即可。
MaixPy MaixPy 内置通信协议
另外 MaixPy 也内置了一个通信协议可以直接使用,使用这个协议可以实现串口甚至 TCP 来切换应用、控制应用、获取应用发出的数据等。
比如 AI 检测应用检测到物体后发出的坐标就可以通过这个协议解析到。
其它教程
- 【MaixPy/MaixCAM】视觉利器 -- MaixCAM 入门教程二 看串口讲解部分
- 视觉模块和STM32如何进行串口通信
- [MaixCam]使用心得二:UART串口通信
- 更多请自行互联网搜索
MaixCAM UART 串口排查指南
适用型号:MaixCAM / MaixCAM-Pro / MaixCAM2
参考文档:MaixPy UART 串口使用介绍
目录
快速排查流程图
串口通信异常
├── 1. 硬件接线是否正确?
│ ├── GND 是否共地?
│ ├── RX/TX 是否交叉连接?(A的TX → B的RX)
│ └── Type-C 转接板是否正插?(MaixCAM 独有问题)
├── 2. 引脚功能是否设置?
│ ├── 是否用 pinmap 设置了引脚功能为 UART?
│ └── 引脚是否与其它功能(WiFi、SPI等)冲突?
├── 3. 参数是否一致?
│ ├── 波特率是否匹配?
│ ├── 数据位 / 校验位 / 停止位是否一致?
│ └── 是否使用了推荐波特率 115200?
├── 4. 代码是否正确?
│ ├── 串口设备路径是否正确?(/dev/ttyS0, /dev/ttyS1...)
│ ├── 是否同时使用了 read 和 set_received_callback?(不可混用)
│ └── 是否加了 sleep 释放 CPU?
└── 5. 其它
├── 是否是 UART0 且被拉低导致无法开机?
└── 是否使用了不支持的波特率?
问题分类排查
完全无法通信(收发均无数据)
排查步骤:
| 步骤 | 检查项 | 操作 |
|---|---|---|
| ① | 接线检查 | 确认 GND 共地,RX/TX 交叉连接(A的TX→B的RX,A的RX→B的TX) |
| ② | Type-C 转接板方向 | MaixCAM 使用 USB 引出的串口时,Type-C 正插和反插会让 RX/TX 交换。尝试将 Type-C 翻转一面再插 |
| ③ | 引脚功能映射 | 非默认串口引脚必须先用 pinmap.set_pin_function() 设置功能 |
| ④ | 串口设备路径 | 用 uart.list_devices() 确认实际设备路径,一般 /dev/ttyS* 中 * 就是串口号 |
| ⑤ | 波特率匹配 | 两端波特率必须一致,推荐 115200 |
常见代码错误:
# ❌ 错误:没有设置引脚功能就直接使用
serial_dev = uart.UART("/dev/ttyS1", 115200)
# ✅ 正确:先设置引脚功能
from maix import uart, pinmap, err
err.check_raise(pinmap.set_pin_function("A19", "UART1_TX"), "Failed")
err.check_raise(pinmap.set_pin_function("A18", "UART1_RX"), "Failed")
serial_dev = uart.UART("/dev/ttyS1", 115200)
能发不能收
排查步骤:
| 步骤 | 检查项 | 操作 |
|---|---|---|
| ① | RX 引脚接线 | 确认本端的 RX 引脚连接到了对方的 TX 引脚 |
| ② | RX 引脚功能映射 | TX 和 RX 都需要设置 pinmap,不能只设 TX |
| ③ | read 参数 | 检查 read() 的 timeout 参数,timeout=0 可能返回空 |
| ④ | 回调冲突 | 如果设置了 set_received_callback,不要再调用 read(),否则会读取出错 |
| ⑤ | 对方是否在发送 | 用逻辑分析仪或万用表确认对方 TX 引脚有信号输出 |
推荐读取方式:
# 方式一:轮询读取(推荐新手)
while not app.need_exit():
data = serial.read() # read(-1, 0):有数据立即返回
if data:
print("收到:", data)
time.sleep_ms(1) # 释放 CPU,必须加!
# 方式二:阻塞读取
data = serial.read(len=-1, timeout=-1) # 一直等到收到数据才返回
# 方式三:回调函数(不能同时用 read)
def on_received(serial, data):
print("收到:", data)
serial.set_received_callback(on_received)
while not app.need_exit():
time.sleep_ms(100)
能收不能发
| 步骤 | 检查项 | 操作 |
|---|---|---|
| ① | TX 引脚接线 | 确认本端 TX 连接到对方 RX |
| ② | TX 引脚功能映射 | 检查 pinmap 是否设置了 TX 功能 |
| ③ | 数据类型 | write_str() 发送字符串,write() 发送 bytes,确认使用的函数正确 |
| ④ | 串口初始化 | 确认 UART() 对象创建成功,没有报错 |
发送数据类型说明:
# 发送字符串
serial.write_str("Hello")
# 发送字节流
serial.write(b'\x01\x02\x03')
# 字符串转字节流
serial.write("Hello".encode("utf-8"))
# 中文发送(必须 encode)
serial.write("你好".encode("utf-8")) # → b'\xe5\xa5\xbd'
收到乱码
最大概率原因:波特率不匹配!
| 排查项 | 说明 |
|---|---|
| 波特率不一致 | 两端必须使用相同波特率,最常见原因是写错了其中一端的波特率 |
| 使用了不支持的波特率 | 芯片对波特率有精度要求,非标波特率可能导致误码,强烈推荐 115200 |
| 编码不一致 | 对方发的是 GBK 编码,你用 UTF-8 解码就会乱码 |
| 电平不匹配 | 对方是 5V TTL 电平,MaixCAM 是 3.3V,需要电平转换 |
波特率精度说明(MaixCAM2):
底层时钟 200MHz,分频公式:
baud = uart_clk / (小数分频 × 16)
例如 115200 时,分频器设置为 108.5,精度误差仅 0.0064%,完全可用。
⚠️ MaixCAM / MaixCAM-Pro:仅验证 115200 可靠可用,其它波特率误码率可能很高。
数据丢失或不完整
| 排查项 | 说明 |
|---|---|
| read 时没有加 sleep | 循环中必须加 time.sleep_ms(1) 释放 CPU |
| read 的 len 参数限制 | read(len=10) 最多只返回 10 字节,超出部分可能丢失 |
| 缓冲区溢出 | 对方发送太快、处理太慢,导致缓冲区溢出 |
| 帧协议不完整 | 没有帧头帧尾校验,导致粘包/拆包问题 |
| 回调和 read 混用 | 设置了 callback 又调用 read,会导致数据读取出错 |
防止数据丢失的读取模式:
# 方式一:指定长度 + 超时(推荐定长协议)
data = serial.read(len=10, timeout=1000) # 读 10 字节,最多等 1 秒
# 方式二:循环拼接(适合变长协议)
buffer = b''
while not app.need_exit():
data = serial.read()
if data:
buffer += data
# 按帧头帧尾解析 buffer
while b'$' in buffer and b'*' in buffer:
start = buffer.index(b'$')
end = buffer.index(b'*', start)
frame = buffer[start+1:end]
buffer = buffer[end+1:]
print("解析到帧:", frame)
time.sleep_ms(1)
USB 口相关问题
Q:为什么插上 USB 电脑没出现串口设备?
A: MaixCAM 的 USB 口是 USB 功能(网络/存储),不是 USB 转串口。默认虚拟成 USB 网卡。
解决方案:
- 电脑访问终端 → 使用 SSH 连接(
ssh root@<设备IP>) - 电脑串口通信 → 需要额外购买 USB 转 UART 转接板,连接板子的串口引脚
电脑 ──USB──> [USB转UART转接板] ──TX/RX/GND──> MaixCAM 串口引脚
开机异常问题
MaixCAM / MaixCAM-Pro 的 UART0 有两个特殊限制:
| 问题 | 原因 | 解决 |
|---|---|---|
| 无法开机 | UART0 的 TX 引脚(A16)被外部电路拉低 | 检查 A16 是否被拉低,保持浮空或使用电平转换芯片 |
| 开机日志干扰通信 | UART0 开机会打印日志,直到出现 serial ready |
单片机端需丢弃开机阶段的数据;或改用 UART1 |
| UART0 被系统占用 | UART0 是默认的 maix protocol 串口和系统终端 |
遇到问题建议换用 UART1 |
⚠️ 如果你做了 3.3V 转 5V 电平转换电路,务必确保 TX 默认不是拉低状态!这是芯片特性,TX 拉低 = 无法开机。
引脚与串口映射速查表 MaixCAM / MaixCAM-Pro
| 串口 | TX 引脚 | RX 引脚 | 设备路径 | 备注 |
|---|---|---|---|---|
| UART0 | A16 | A17 | /dev/ttyS0 |
USB 口引出的同一个串口;系统日志串口;开机打印日志 |
| UART1 | A19 | A18 | /dev/ttyS1 |
推荐用于自定义通信 |
注意: 引脚默认可能用作其它用途(如 SPI、WiFi),使用前请查看 PINMAP 文档。
MaixCAM2
| 串口 | TX 引脚 | RX 引脚 | 设备路径 | 备注 |
|---|---|---|---|---|
| UART0 | U0T | U0R | /dev/ttyS0 |
系统终端和日志串口 |
| UART1 | — | — | /dev/ttyS1 |
— |
| UART2 | B0 | B1 | /dev/ttyS2 |
— |
| UART3 | — | — | /dev/ttyS3 |
— |
| UART4 | A21 | A22 | /dev/ttyS4 |
板上默认引脚 |
代码模板与示例
from maix import uart, pinmap, err
# 示例:配置非默认 UART 引脚
err.check_raise(pinmap.set_pin_function("A19", "UART1_TX"), "Failed to set TX")
err.check_raise(pinmap.set_pin_function("A18", "UART1_RX"), "Failed to set RX")
serial = uart.UART("/dev/ttyS1", 115200)
serial.write_str("Hello MaixPy")
from maix import uart, app, time
serial = uart.UART("/dev/ttyS0", 115200)
while not app.need_exit():
data = serial.read()
if data:
print("收到:", data)
time.sleep_ms(1)
FAQ 快问快答
| # | 问题 | 回答 |
|---|---|---|
| 1 | 插上 USB 电脑识别不到串口? | 正常,USB 口是网络/存储功能,不是串口。需用 SSH 连接或额外的 USB 转 UART 转接板。 |
| 2 | Type-C 正插反插有区别吗? | MaixCAM 有区别! 正插和反插会交换 RX/TX,通信不上时试试翻转 Type-C。 |
| 3 | 推荐用哪个波特率? | 115200,这是唯一在所有型号上都验证可靠的波特率。 |
| 4 | UART0 和 UART1 选哪个? | 推荐 UART1。UART0 是系统串口,有开机日志干扰、系统占用、TX 拉低无法开机等问题。 |
| 5 | write_str 和 write 有什么区别? | write_str 发送字符串(str),write 发送字节流(bytes)。中文/二进制数据用 write + encode()。 |
| 6 | read 和 callback 能同时用吗? | 不能! 设置了 set_received_callback 就不要再调用 read(),否则读取出错。 |
| 7 | 怎么知道我的串口设备路径? | from maix import uart; print(uart.list_devices()) |
| 8 | 串口0开机打印的乱码是什么? | 那是系统启动日志,到 serial ready 为止。单片机端需丢弃这部分数据。 |
| 9 | 接了电平转换板但无法开机? | 检查 UART0 TX(A16)是否被默认拉低,芯片特性:TX 拉低 = 无法开机。保持浮空或使用电平转换芯片。 |
| 10 | 发送中文出现乱码? | 确保发送时 encode("utf-8"),接收端也要用 UTF-8 解码。 |
