

V831完美的单目测距
2022-03-28
前言
经过一下午的努力,最终终于实现了完美的单目测距,网上教的都是opencv怎么测算距离,人家有函数唉,入手了V831,做了人脸识别,同时进行了测距,K210通用。废话不多说上图。
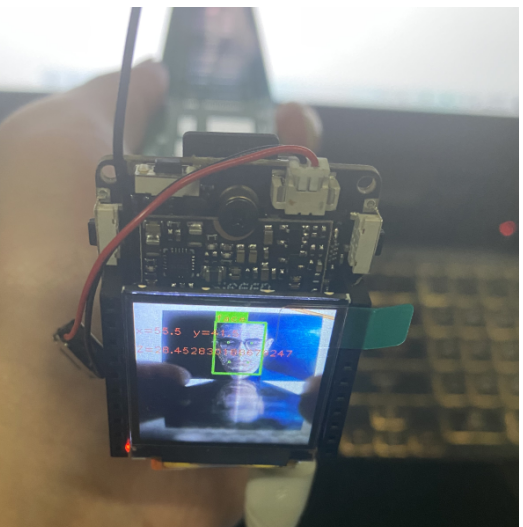
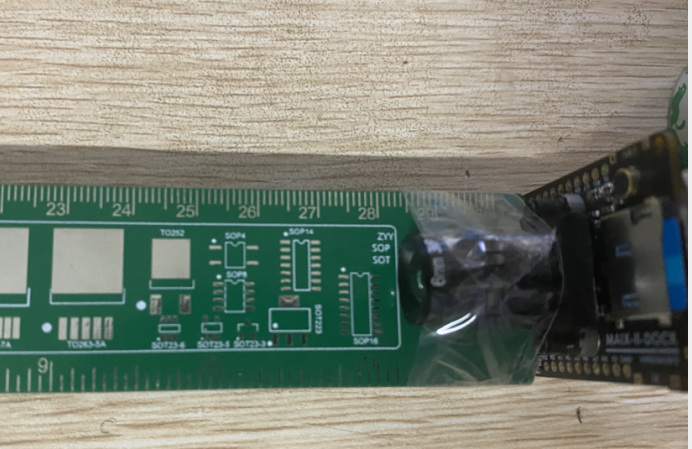
它那个镜头其实还要在靠近里面一点,距离应该是28.4到28.5之间。测得真的特别准。
单目测距的原理
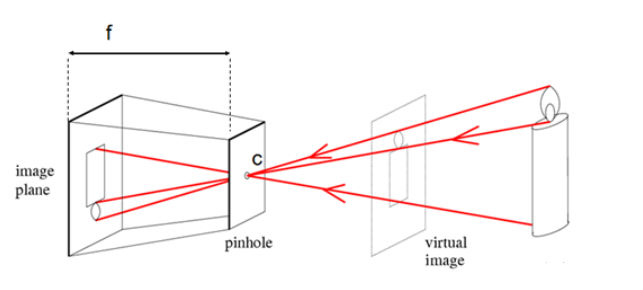
小孔成像。很简单,用的是小孔成像,原理大家都知道。该怎么做呢。
我们需要以下几个参数:
1、相机焦距
2、物体宽度
3、一个常数
参数计算
相机焦距
假设我们有一个宽度为 W 的目标。然后我们将这个目标放在距离我们的相机为 D 的位置。我们用相机对物体进行拍照并且测量物体的像素宽度 P 。这样我们就得出了相机焦距的公式:
F = (P x D) / W
举个例子,假设我在离相机距离 D = 28cm的地方放一张 待识别图片(W = 13)并且拍下一张照片。我测量出照片的像素宽度为 P = 53 像素
因此我的焦距 F 是:
F = (53*28) / 13 = 116
有人会问像素怎么获得呢,直接看代码吧
img.draw_rectangle(box[0], box[1], box[0] + box[2], box[1] + box[3], color=bg_color, thickness=2)
img.draw_rectangle(box[0], box[1] - font_wh[1], box[0] + font_wh[0], box[1], color=bg_color, thickness = -1)
img.draw_string(box[0], box[1] - font_wh[1], disp_str, color=font_color)
img.draw_string(0,30, "x="+str(((box[0]+box[3])/2)-35), color= font_color)
img.draw_string(70,30, "y="+str((box[1]+box[2])/2), color= font_color)
Lm = (box[1]+box[3])/2
length = K*13/Lm
img.draw_string(0,60 , "Z="+str(length), color= font_color)
你识别到一个物体,然后给它画框,用一个列表表示出来四个点
Lm=(box[1]+box[3])/2 这个就是像素值
测距
继续将相机移动,靠近或者离远物体或者目标时,可以用相似三角形计算出物体离相机的距离:
L= (W x F) / P
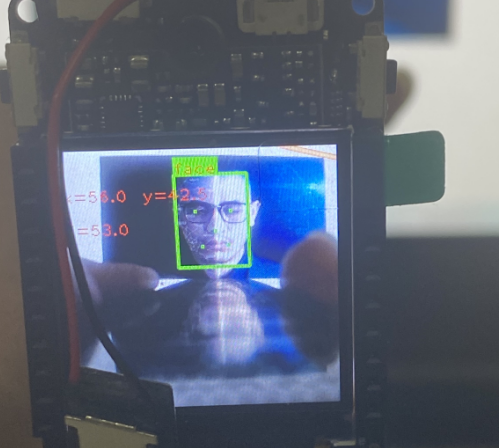
假设我将相机移到距离目标 28cm 的地方识别物体。通过自动的图形处理我可以获得图片的像素为 53像素。将这个代入公式,得:
L= (13 x 116) / 53 = 28
这样我们就精准的算出了距离。
附上代码
from maix import camera, image, display
import serial
ser = serial.Serial("/dev/ttyS1",115200) # 连接串口
K=116
class Face_recognize :
score_threshold = 70 #识别分数阈值
input_size = (224, 224, 3) #输入图片尺寸
input_size_fe = (128, 128, 3) #输入人脸数据
feature_len = 256 #人脸数据宽度
steps = [8, 16, 32] #
channel_num = 0 #通道数量
users = [] #初始化用户列表
threshold = 0.5 #人脸阈值
nms = 0.3
max_face_num = 3 #输出的画面中的人脸
def __init__(self):
from maix import nn, camera, image, display
from maix.nn.app.face import FaceRecognize
for i in range(len(self.steps)):
self.channel_num += self.input_size[1] / self.steps[i] * (self.input_size[0] / self.steps[i]) * 2
self.channel_num = int(self.channel_num) #统计通道数量
global face_recognizer
face_recognizer = Face_recognize()
while True:
img = camera.capture() #获取224*224*3的图像数据
AI_img = img.copy().resize(224, 224)
faces = face_recognizer.face_recognizer.get_faces(AI_img.tobytes(),False) #提取人脸特征信息
if faces:
for prob, box, landmarks, feature in faces:
disp_str = "face"
bg_color = (0, 255, 0)
font_color=(255, 0, 0)
box,points = face_recognizer.map_face(box,landmarks)
font_wh = image.get_string_size(disp_str)
for p in points:
img.draw_rectangle(p[0] - 1, p[1] -1, p[0] + 1, p[1] + 1, color=bg_color)
img.draw_rectangle(box[0], box[1], box[0] + box[2], box[1] + box[3], color=bg_color, thickness=2)
img.draw_rectangle(box[0], box[1] - font_wh[1], box[0] + font_wh[0], box[1], color=bg_color, thickness = -1)
img.draw_string(box[0], box[1] - font_wh[1], disp_str, color=font_color)
img.draw_string(0,30, "x="+str(((box[0]+box[3])/2-28)), color= font_color)
img.draw_string(70,30, "y="+str((box[1]+box[2])/2-20), color= font_color)
x=(box[0]+box[3])/2-28
y=(box[1]+box[2])/2
Lm = (box[1]+box[3])/2
length = K*13/Lm
img.draw_string(0,60 , "Z="+str(round(length)), color= font_color)
display.show(img)
总结
主要原理就是小孔成像
